


【实验室】|韶关学院基于STC32G芯片多开发板
简介
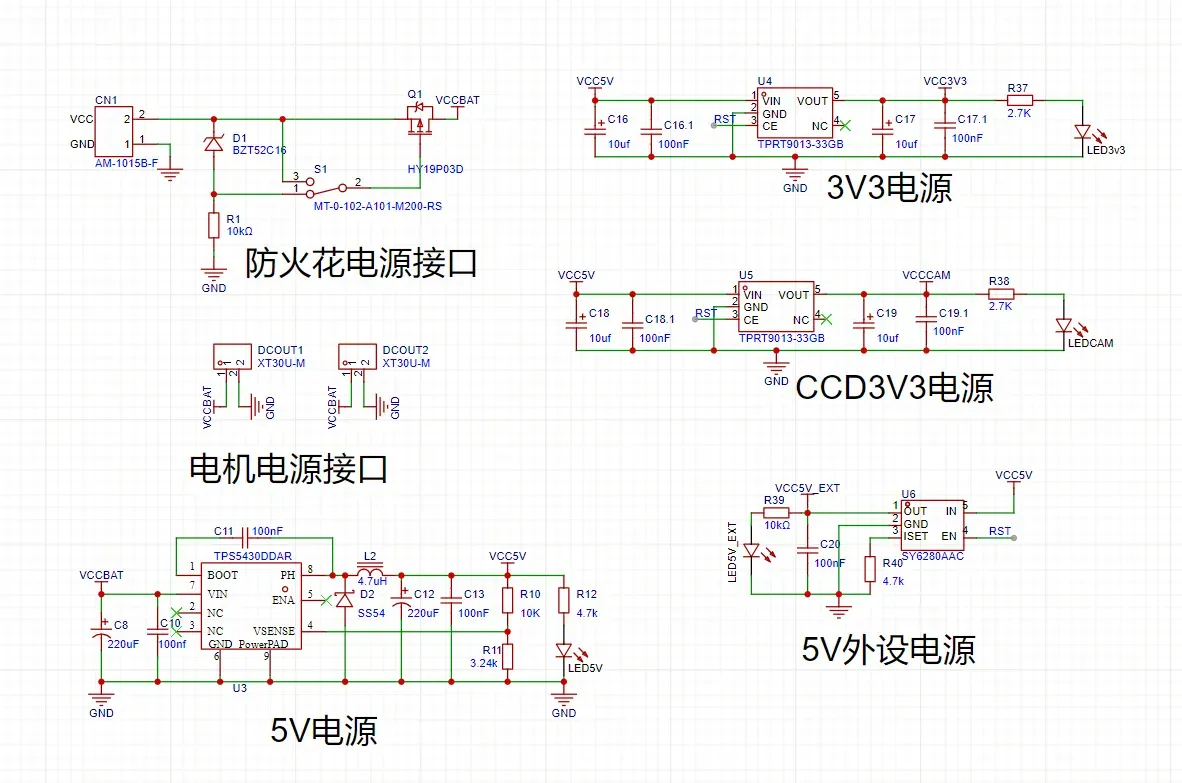
本项目为STC32G12K128的开发板。该项目带独立的5V和3.3V稳压电源, 5V电源芯片使用IT的TPS5430DDAR和SY6280AAC,3V3电源芯片使用RT9013-3.3。总电源输入用
简介:本项目为STC32G12K128的开发板。该项目带独立的5V和3.3V稳压电源, 5V电源芯片使用IT的TPS5430DDAR和SY6280AAC,3V3电源芯片使用RT9013-3.3。总电源输入用开源协议
:GPL 3.0
描述
项目简介
本项目为STC32G12K128的开发板。该项目带独立的5V和3.3V稳压电源, 5V电源芯片使用IT的TPS5430DDAR和SY6280AAC,3V3电源芯片使用RT9013-3.3。总电源输入用mos管做开关防火花电路。
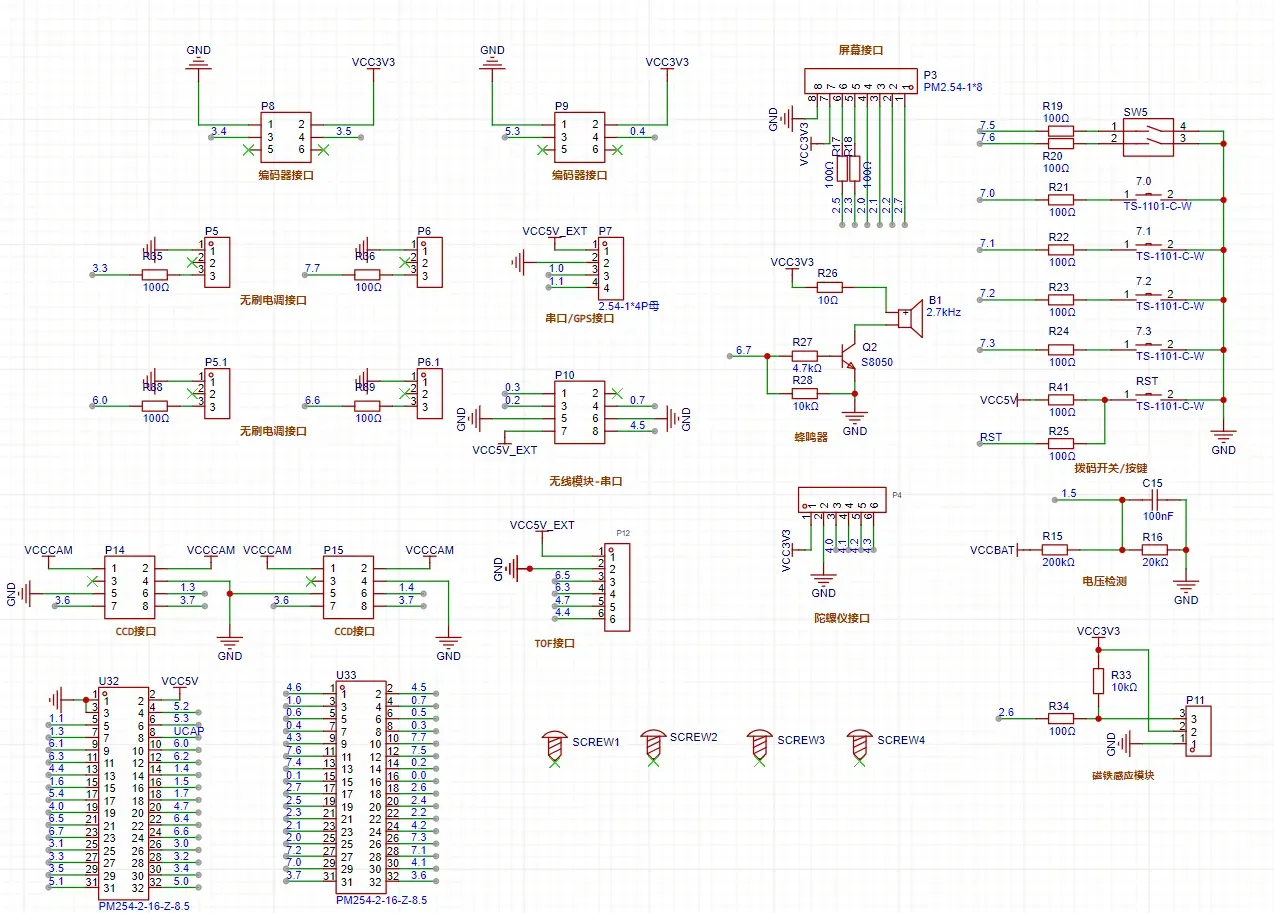
板载无线模块接口,4个无刷电调接口,2个CCD接口,1个串口接口,电源指示灯,蜂鸣器,陀螺仪接口,两路路编码器信号接口,一个GPS接口,和额外的2个电机电源接口。
可用与智能小车等项目的开发。
项目功能
本项目为STC32G12K128的开发板,插上对应的核心板时该项目可以实现卫星定位,控制气垫船前景与转向和蜂鸣器鸣叫等功能。
项目参数
本设计的电源芯片采用TPS5430、RT9013与SY6280AAC三款芯片:TPS5430作为同步降压控制器,具备.5-36V宽压输入、集成80mΩ低阻MOSFET及50μs级瞬态响应能力;RT9013低压差线性稳压器以85dB@1kHz纹波抑制比、60μA超低静态电流和多重电路保护机制;SY6280AAC则聚焦便携设备电源管理,通过0.1μA关断电流、20ns级快速切换及反向电流阻断功能,在电池供电系统和热插拔场景中实现高效节能与安全防护。三款器件均满足工业级可靠性标准,覆盖从大功率转换到微功耗控制的全场景电源需求。
原理解析(硬件说明)
本项目由以下部分组成:电源电路、GPS模块、编码器模块、蜂鸣器模块、无刷电调模块、线性CCD模块、陀螺仪模块
1.电源电路:
采用AM-1015B-F接口作为供电接口,同时使用mos管用作做防反接电路,反接时不会烧坏电路板。
2.无刷电调模块:
无刷电调模块可以用来控制四个无刷电机的输出,从而控制车速,可以通过差速车的转向。2.GPS和陀螺仪模块:
陀螺仪通过实时检测车辆的角速度变化,提供姿态感知数据,辅助智能车在高速过弯、避障或复杂路径跟踪时精准控制车身稳定性,避免侧滑或转向不足,尤其在无明确赛道标识的场合结合加速度计实现航向角融合计算,提升自主导航的鲁棒性;
3.GPS模块主要用于室外组别中全局定位,通过经纬度坐标帮助车辆规划最优路径、识别赛道边界或完成多目标点巡航任务,但其定位精度易受信号遮挡影响,通常需融合编码器里程计或视觉SLAM技术进行补偿,确保厘米级定位可靠性。
两者协同工作可显著提升智能车的环境适应性与动态控制性能,但需根据具体赛题规则优化传感器选型与数据融合策略。
4.编码器模块:
编码器模块用于测量车轮转速和行驶距离,提供精准的速度反馈和里程数据,支持智能车的速度控制、路径跟踪和定位,是运动控制的核心传感器。
5.线性CCD模块用于实时扫描赛道,识别边界、弯道和特殊地形,提供路径纠偏和地形检测数据,是气垫越野组智能车实现自主导航与赛道适应的核心传感器。
注意事项
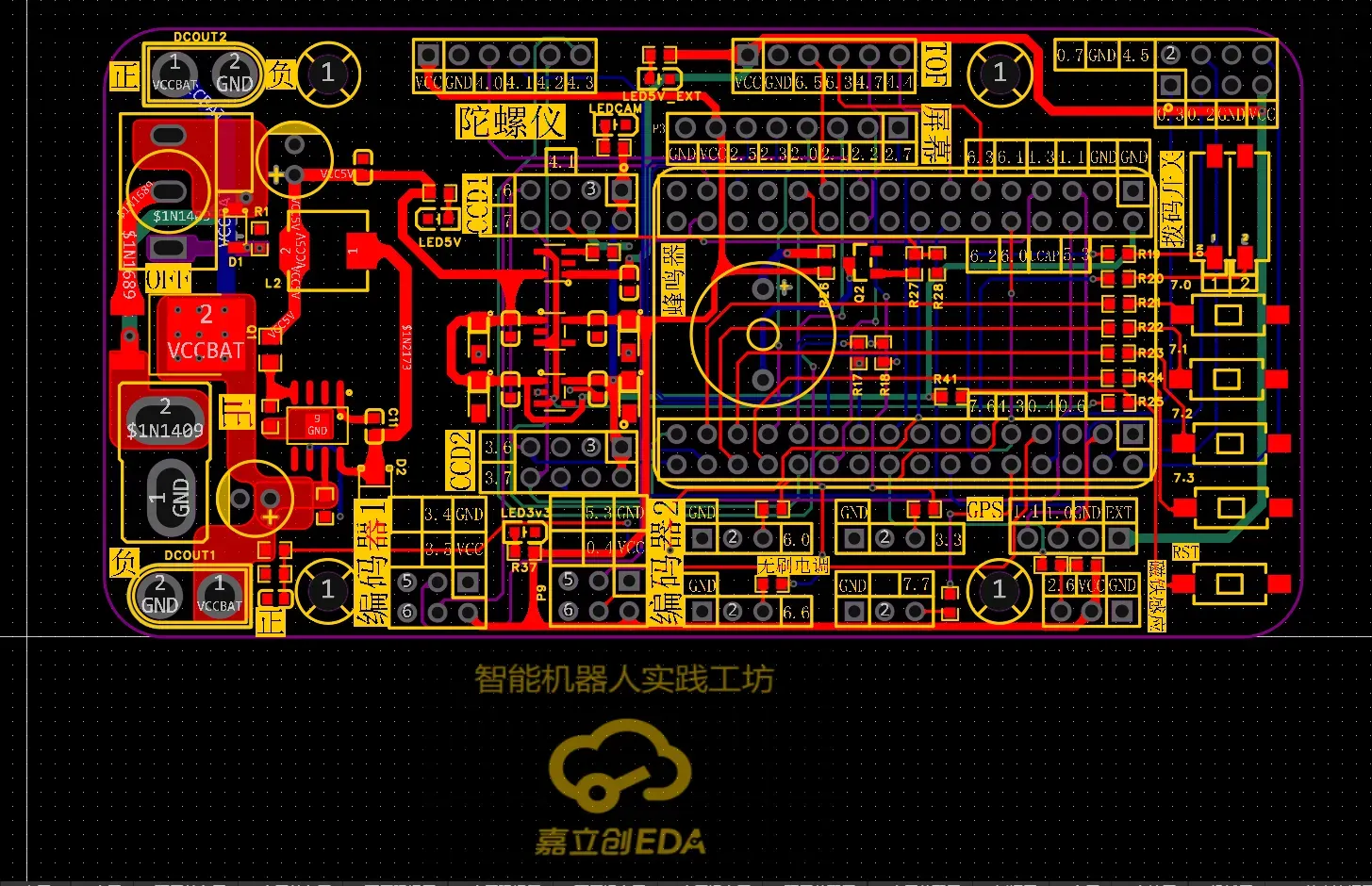
绘制PCB时注意排针的位置,需要与核心板一致。核心板可在逐飞科技购买。
PCB如下:
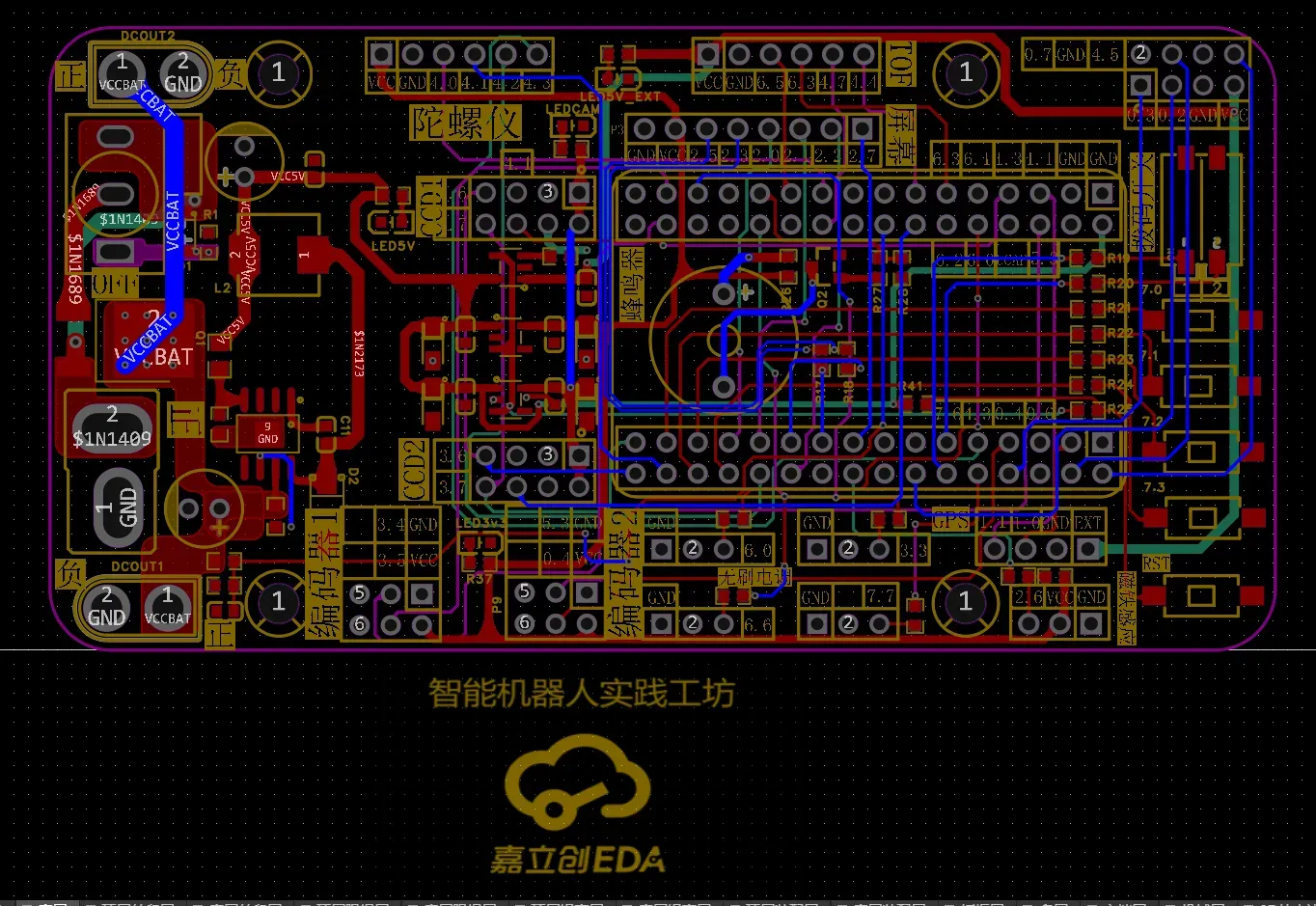
设计图
BOM
 克隆工程
克隆工程工程成员
 暂无相关工程
暂无相关工程
评论