


开源协议
:GPL 3.0
描述
项目简介
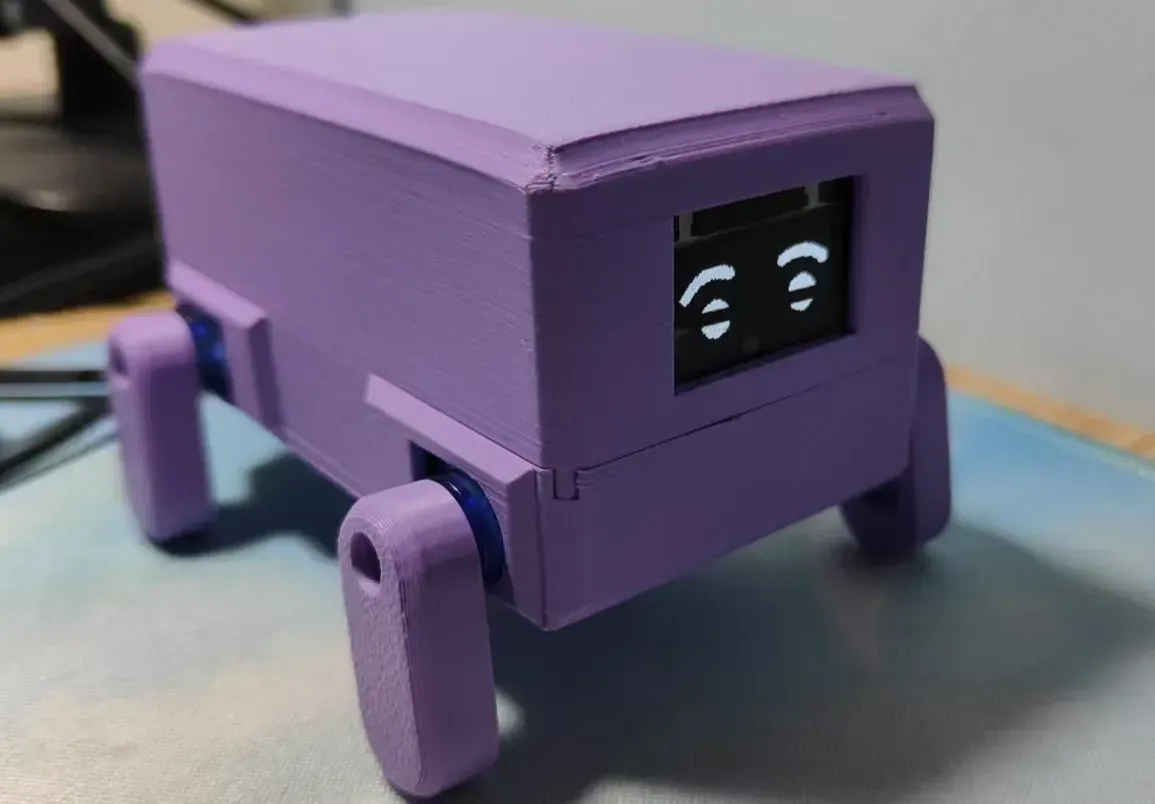
本项目是基于ESP8266单片机的赛博机器狗,具有前后左右移动,抬左右手,蹲下、趴下等真实动物的行为.
项目功能
本设计是基于STC89C51/52单片机设计的温湿度报警系统;设置有四个独立按键,功能分别为设置、加、减、确定,能实现报警阀值的调节,当温度或湿度超出阈值范围时,有报警提示声和对应的报警灯提示;
项目参数
此处可填写项目的相关功能参数介绍,示例:
- 本设计采用TP5400单节锂电池充电放电升压芯片,在只是用一节18650电池情况下仍能稳定输出5V;
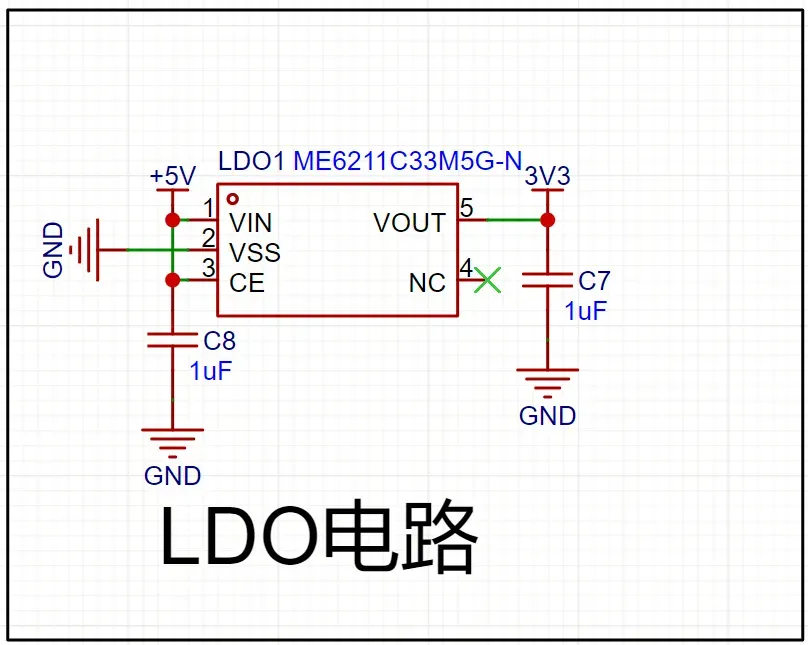
- 使用ME6211C33降压稳压芯片,为主控提供3.3v电源
- 本设计采用oled屏幕显示,显示机器狗的表情及与手机互联的信息;
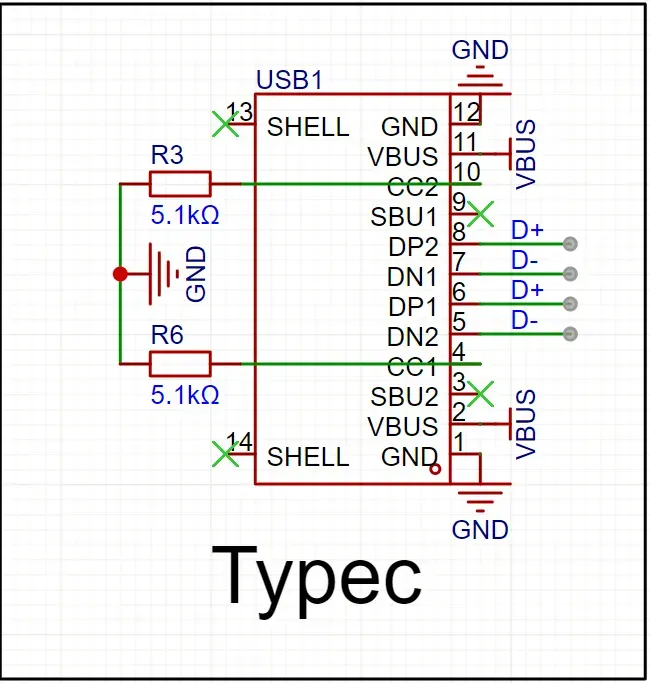
- 增加ch340k串口芯片及附属电路,仅使用一个Typec口实现充电与调试共用;
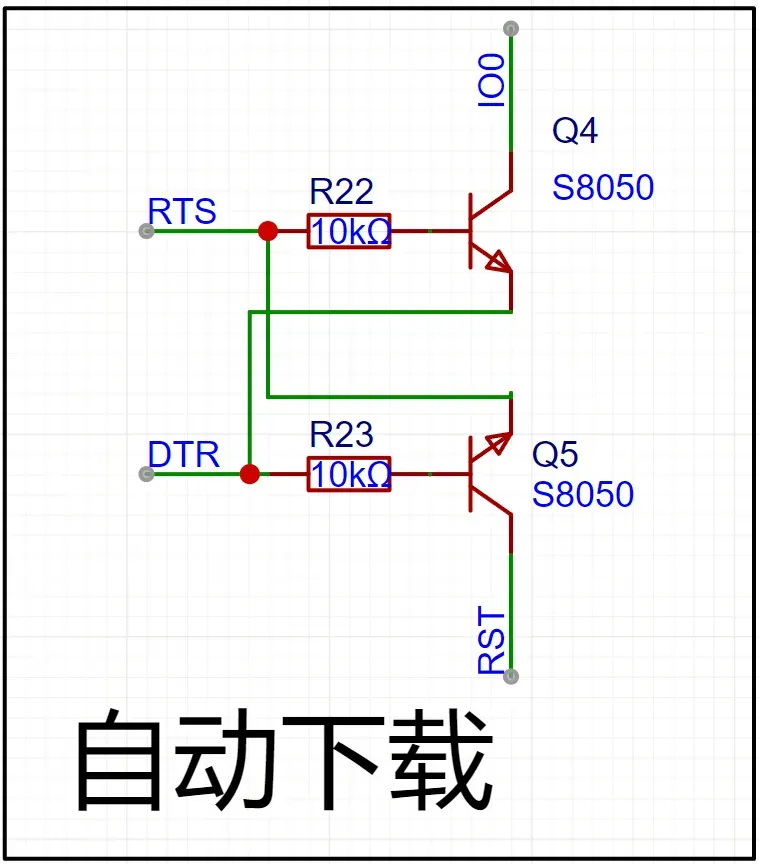
- 增加自动下载电路;
- 本设计采用ESP8266主控,内置WIFI功能,通过AP模式遥控
- 屏幕支持0.96寸SSD1306/SSD1315驱动OLED显示屏,可显示表情、时钟、天气等相关信息
- 项目支持SG-90/MG-90 180度及360度版本,推荐使用180度版本,自带限位器,无需电机校准
原理解析(硬件说明)
本项目由以下部分组成,电源部分、主控部分、及负载部分,本项目主要是通过ESP8266建立AP热点,手机链接后,根据界面提示对赛博机器狗进行对应操作。
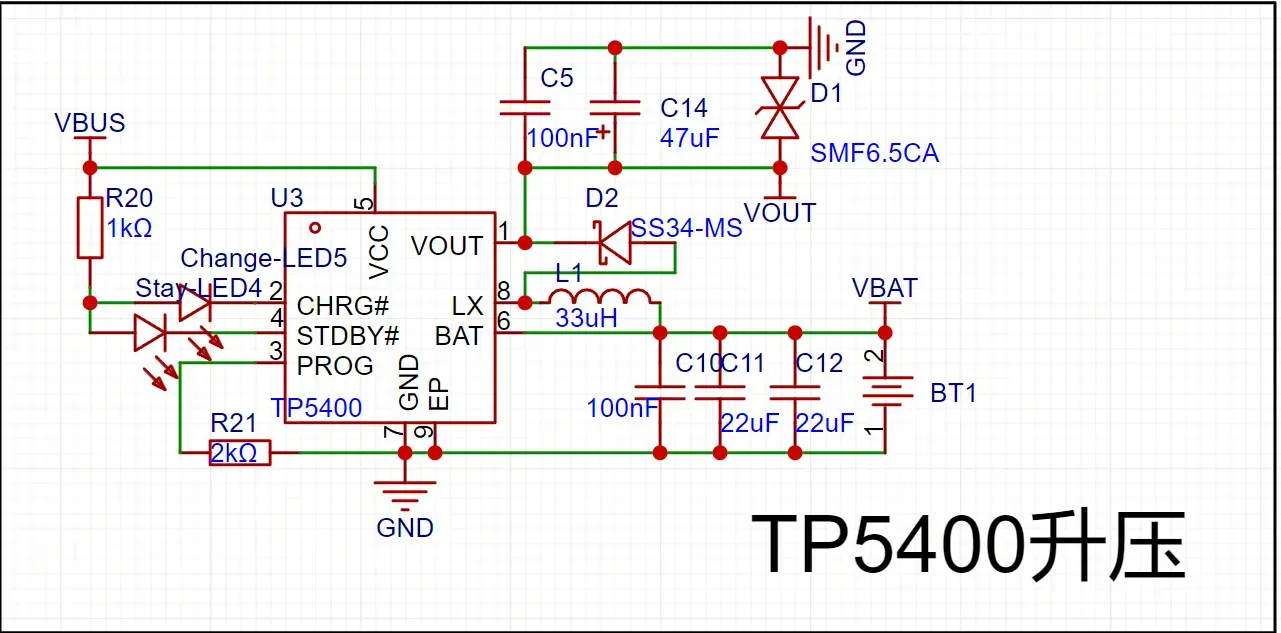
电源电路:
电源部分采用TP5400升压5v为舵机供电,ME6211C33降压至3.3V为主控供电。
TP5400 为一款移动电源专用的单节锂离子电池充电器和恒定5V升压控制器,充电部分集高精度电压和充电电流调节器、预充、充电状态指示和充电截止等功能于一体,可以输出最大1A充电电流。而升压电路采用CMOS工艺制造的空载电流极低的VFM开关型DC/DC升压转换器。其具有极低的空载功耗(小于10uA),且升压输出驱动电流能力能达到1A。
ME6211C33是一款高精度、低噪声CMOS LDO稳压器。具有超低输出噪声、高纹波抑制比、低压差以及极快的导通时间 。
设计了电源切换电路,防止电源倒灌。
<img src="https://image.lceda.cn/oshwhub/pullImage/de98b2ff3721443d8d58bc41b000f725.png" width="500" />
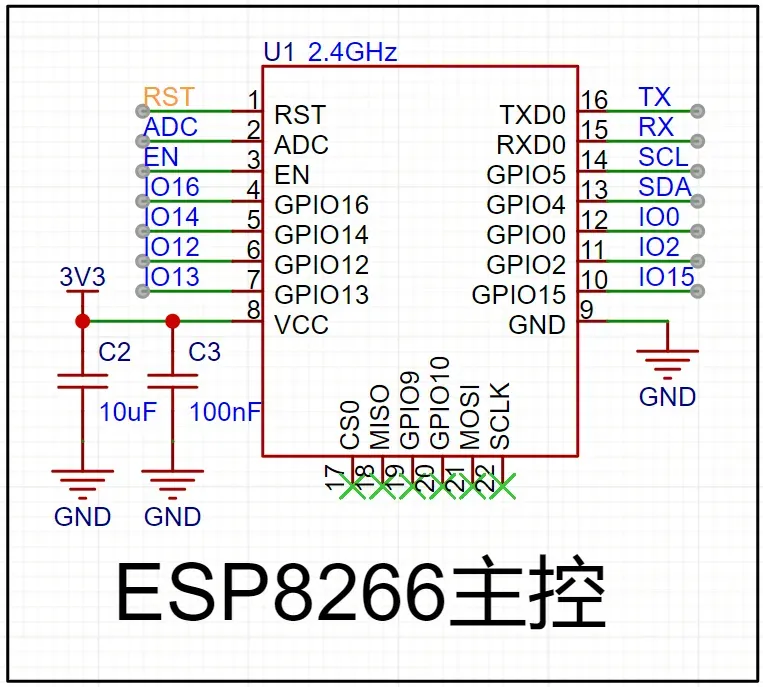
主控电路:
项目采用了乐鑫科技的ESP8266芯片模组作为主控。ESP8266芯片以其高集成度、优异的RF性能和低功耗著称,集成了完整的Wi-Fi功能,非常适合用于物联网应用的开发。其内置的Tensilica L106 32位RISC处理器,最高工作频率可达160 MHz,支持实时操作系统(RTOS)和Wi-Fi协议栈,使其在处理数据传输及任务管理时具备极强的灵活性和高效性。

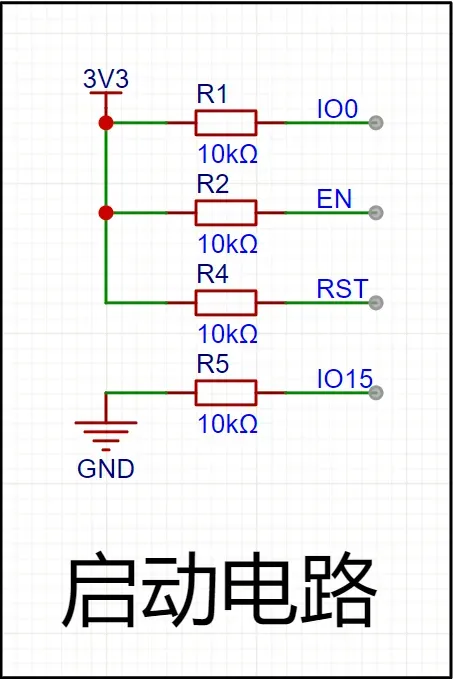
该模组的电路设计遵循官方推荐的设计规范。在GPIO0、GPIO2、RST、EN等引脚上拉10K电阻,以确保这些引脚在芯片启动时保持高电平,从而确保芯片能够正常工作。GPIO15引脚在SDK中定义为CS片选引脚,同时参考模式启动要求则通过10K下拉电阻保持低电平。由于项目空间有限,并且使用了LDO稳压器,我们简化了电路设计,去除了部分外围电容(如10uF和100nF电容),但这些修改并不影响模组的正常运行(规范而言最好加上,起到滤波作用)。通过参考ESP8266的数据手册和官方的应用设计图,在嘉立创EDA中我们设计的电路最终如下图所示:
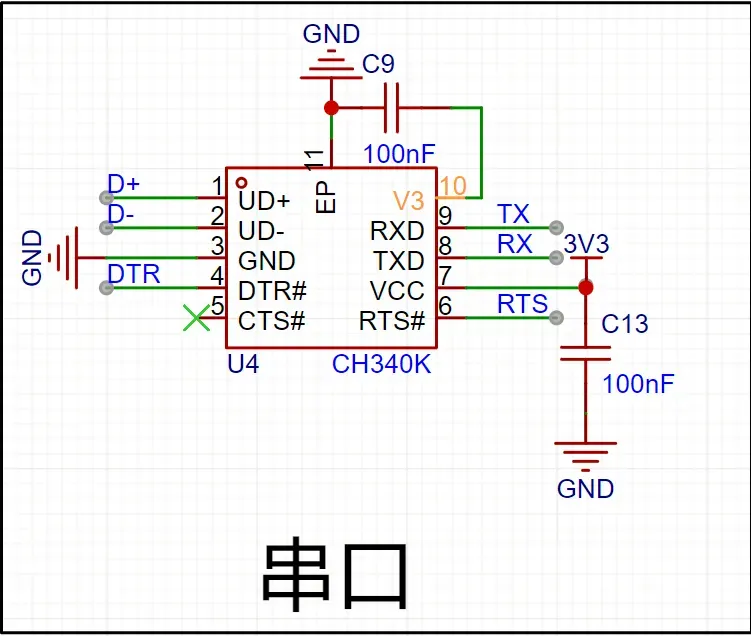
调试电路:
采用TYPE-C-16P接口作为供电接口,同时使用对应的USB数据引脚接入CH340K对应的引脚处,直接使用USB 作为下载和调试,无需转换为串口信号。在CC1和CC2引脚处加入5.1K下拉电阻,便于不同主机识别和配置。
 ......
......
软件代码
软件部分直接使用训练营提供的固件进行烧录,未对程序修改。
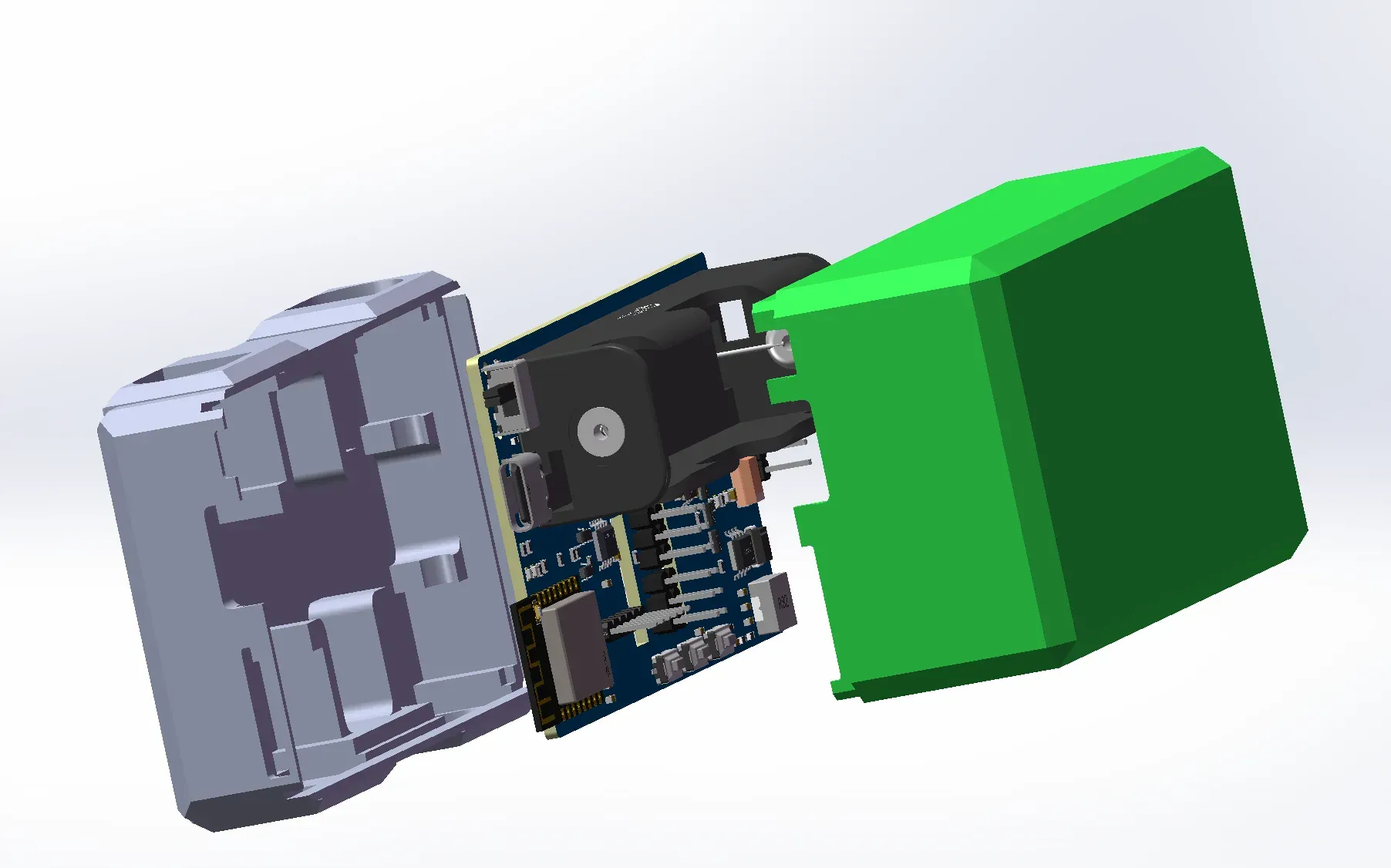
外壳
因重新设计了电路,元器件的摆放位置与训练营有差异,所以外壳进行了些许修改,缩小了舵机夹持的位置,使四个舵机的位置更加规整。
注意事项
- 切勿强行掰动舵机,避免电机损坏,也可购买金属齿轮的MG90舵机
- OLED显示屏为0.96寸SSD1306或SSD1315驱动
实物图

设计图
BOM
 克隆工程
克隆工程工程成员
 暂无相关工程
暂无相关工程
评论