



标准版
【训练营】基于开源鸿蒙操作系统开发的四足机器狗
3.4k
0
0
2
简介
基于OpenHarmony开源鸿蒙操作系统开发的机器狗
简介:基于OpenHarmony开源鸿蒙操作系统开发的机器狗开源协议
:Public Domain
创建时间:2022-06-21 05:03:01更新时间:2022-07-18 10:21:43
描述
题目要求
产品简介:基于OpenHarmony 开源鸿蒙系统开发而成, 使用的芯片为hi3861, 支持16路舵机控制,GPIO,ADC,PWM等操作.
已实现机械狗前进,后退,左转,右转,趴下等功能, 后期将会支持强化学习.(需要扩展mpu6050)
题目分析
芯片方案:基于海思Hi3861芯片和PCA9685的多路舵机控制板
Hi3861芯片和PCA9685间通过I2C通信
电路总体设计方案框图

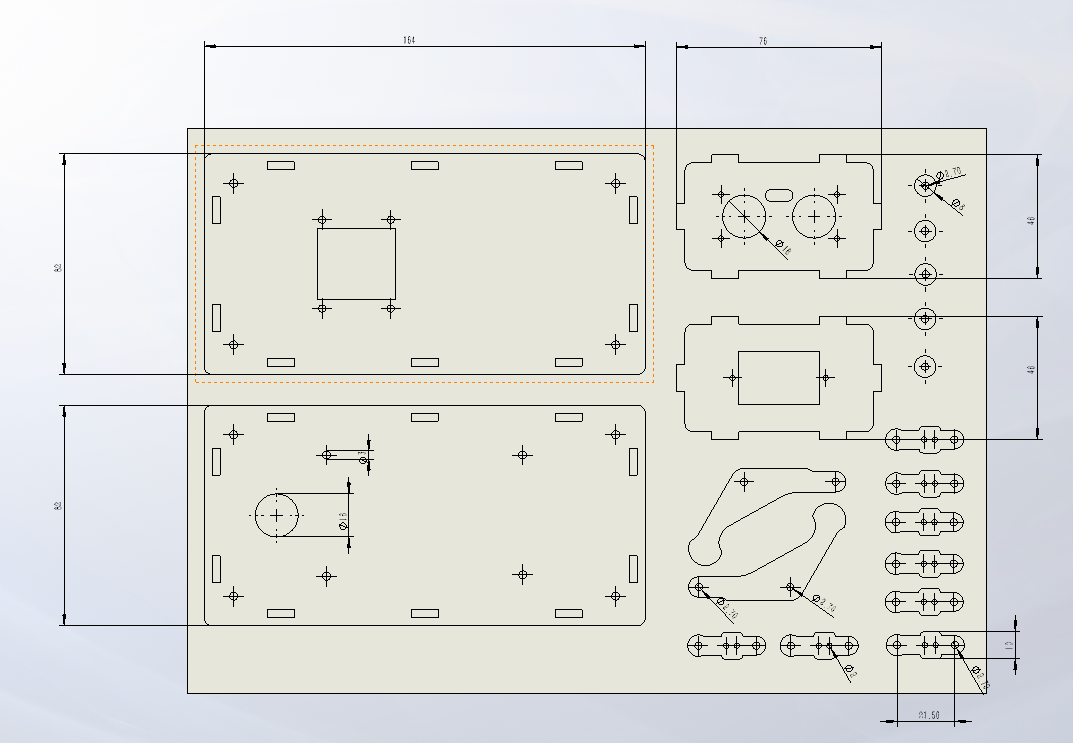
外形设计图
外形采用亚克力板打印,厚度为3mm




BOM
| ID | Name | Designator | Footprint | Quantity |
|---|---|---|---|---|
| 1 | 5VDC蜂鸣器,Φ12,脚距7.6 | BUZ1 | BUZ-TH_BD12.0-P7.60-D0.6-FD | 1 |
| 2 | 10u | C1,C2,C3,C5 | C0805 | 4 |
| 3 | 22u | C4 | C0805 | 1 |
| 4 | HDR-F-2.54_1x2 | H1,H3 | HDR-F-2.54_1X2 | 2 |
| 5 | HDR-F-2.54_1x4 | H2,H9,H10,H11,H12 | HDR-F-2.54_1X4 | 5 |
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论