


ESP32 Arduino SimpleFoc平衡车
简介
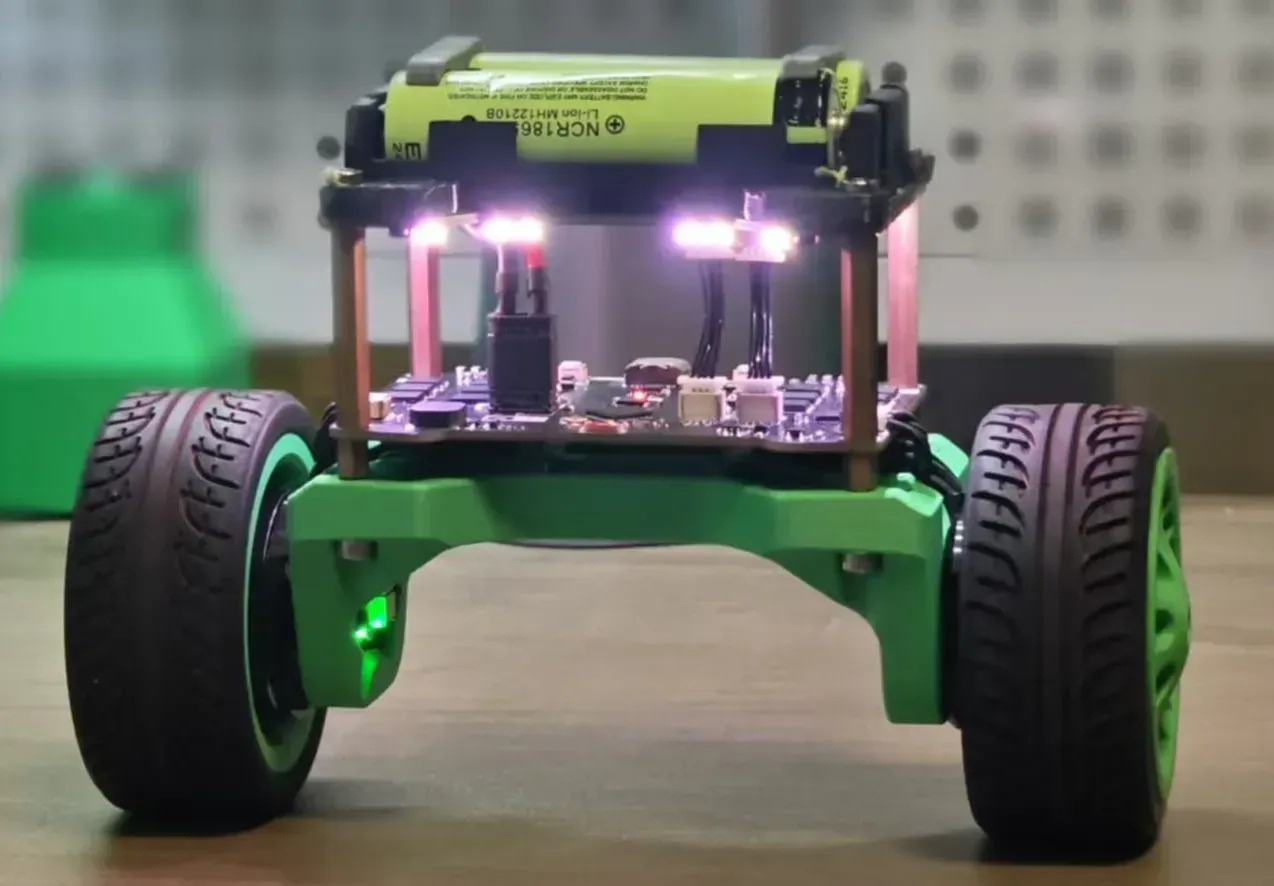
基于ESP32-S3和Arduino SimpleFoc无刷电机平衡车、手机APP遥控。
简介:基于ESP32-S3和Arduino SimpleFoc无刷电机平衡车、手机APP遥控。开源协议
:MIT License
描述
ESP32S3 Arduino SimpleFoc 无刷电机平衡车
开源不易,感谢点赞 + 收藏
项目简介
基于ESP32S3芯片和Arduino框架下Simplefoc库开发的无刷电机平衡车,支持手机APP控制。车身结构设计参考B站手工饭,电路和程序选用完全不同方案进行设计(采用ESP32-S3FN8单芯片控制方案和Arduino框架)。
-
硬件 采用ESP32-S3FN8单芯片控制方案,有感无刷电机Foc驱动设计(低端电流采样),USB-C 10W快充电路、PCB高度集成一体化设计(硬件电路全开源)。
-
软件:采用Arduino框架和Simplefoc库开发极大降低新手编程和理解门槛、采用HTML5开发了手机APP,支持手机程遥控(软件代码全开源)。
项目展示
- 顶部PCB
-
电路设计:电池盒、IP2326芯片2S(2串)均衡锂电池充电及接口、可编程WS2812 RGB车灯、电源一键开关控制电路、下板DC-DC(TPS63070RNMR芯片)降压电路,电池防反接电路
-
功能介绍:18650 2S电池供电、USB-C 10W快充(PD充满LED指示),可调色RGB车灯,DC-DC降压(为下板供电),防反接保护,电源一键开关。

- 底部PCB
-
电路设计:ESP32S3-FN8主控电路(板载贴片天线设计)、MPU6050陀螺仪、双路无刷电机驱动电路(DRV8300DRGER)、低端电流采用电路(INA181A2IDBVR)、USB-串口程序自动下载电路(CH343P)、LDO稳压电路、蜂鸣器电路、编码器和电机接口。
-
功能介绍:ESP32S3主控、双路无刷电机驱动器,低端电流采样、MPU6050陀螺仪、蜂鸣器、程序下载等。

- 编码器
-
电路设计:AS5600编码器、LED指示、编码器接口等电路(备注 后续更新MT6701方案).
-
功能介绍:AS5600 高精度12位I2C接口角度传感器,用于精确的电机位置反馈。

- 手机APP
- 功能介绍:支持模拟手柄遥控方向控制、MPU矫正,RGB灯效控制、关机控制等
- 手机app安装包位于 App-Phone/unpackage/release/apk目录下

- 组装与展示


配件清单

备注:
1. 下单前仔细核对是否缺件。
2. 配件购买店铺仅供参考,其他同尺寸和型号也可安装(店铺如电机缺货可找其他家)。
3. 安装方法参考安装示意图(连接线SH1.0实际35mm、50mm建议自制 )。
开发环境
- 硬件驱动:VSCode+Platformio(配置视频教程)环境下采用Arduino平台配合SimpleFOC库,实现电机控制和姿态平衡算法(编译问题解决参考)。
- App界面:Hbuilder环境(简单使用视频教程)下采用HTML5+NippleJS+Iro.js进行开发打包生成app。
代码框架
- 硬件驱动:硬件驱动采用RTOS多任务处理,core1主要负责电机FOC控制(FOC原理视频教程),core0负责提供app server响应 ,具体划分如下。

- 手机APP:app控制指令通过http发送给小车,控制行驶和转向,车灯RGB颜色、急停断电等。

软硬件调试
- 硬件焊接——注意事项
- 顶板PCB
- 检查极性:确认各芯片和RGB元件方向正确。
- 焊接检查:用维修放大镜逐一检查引脚,避免虚焊和连锡。
- 电阻测试:万用表对照PCB图纸测量电阻值。
- 通电测试:USB上电,观察充电指示灯是否正常亮起。
- 底板PCB
- 检查极性:确认
各芯片和元件方向正确(尤其是CH343P、双三极管、电流放大器)。 - 焊接检查:用维修放大镜逐点检查元件焊接,避免虚焊、连锡,确保贴片正确。
- 电阻测试:万用表对照PCB点位测量各电阻值,确认符合设计要求。
- WIFI天线匹配:仅匹配电感(
3.3nH),PI型电容暂不焊接。 - 上电测试:确认无误后通电,观察系统运行状态。
- 检查极性:确认
- 软硬联调
- 程序下载测试: 配置软件环境,连接USB,确认串口芯片被识别。 下载
test_ENCODER.ctest_MPU6050.c,测试编码器AB、MPU6050,确保读数正常。 - WiFi测试: 下载
test_WIFI.c,测试信号强度及通信距离。 必要时调整WiFi阻抗匹配(如优化π型电路电容值)。 - 电机驱动测试: 下载
test_FOC.c,测试单路电机驱动。 串口发送M10指令,调整速度(数值≤50),观察运行状态。 - 调参经验分享(移步gitee)
贡献指南
欢迎任何对本项目感兴趣的开发者参与贡献。具体贡献方式包括但不限于:
- 提交代码改进(特别是FOC和姿态PID的调参,让车兼顾纹丝不动和越野性能)
- 提供硬件改进方案并持续开源。
- 编写使用文档、录制视频教程等。
技术交流
- 技术交QQ流群:1032448484(加群注意遵守群公告须知,备注: foc平衡小车)

致 谢
- B站 手工饭 开源项目
- B站 敬小西 交流学习
设计图
BOM
 克隆工程
克隆工程工程成员
 暂无相关工程
暂无相关工程
评论