


专业版
【训练营】四条脚的狗子
1.9k
0
0
1
简介
一只会走会跳会抽风外形很狗的仿生机器狗 使用海思Hi3861作主控芯片,搭载传智教育基于鸿蒙的GEKIPI OHOS,PCA9685 16路PWM驱动8只舵机。
简介:一只会走会跳会抽风外形很狗的仿生机器狗 使用海思Hi3861作主控芯片,搭载传智教育基于鸿蒙的GEKIPI OHOS,PCA9685 16路PWM驱动8只舵机。开源协议
:GPL 3.0
创建时间:2022-06-20 11:44:12更新时间:2022-07-18 06:26:14
描述
一、开发板设计
第一次用Hi3861,不敢搞得太复杂(看到有大神上MPU6050的),决定以通用开发板的方式来设计,除了PCA9685是必须的,其它的只是把通用引脚引出,增加了RX、TX的指示灯,另外,增加GPIO13脚的BUILD_IN_LED,以方便程序调试和验证
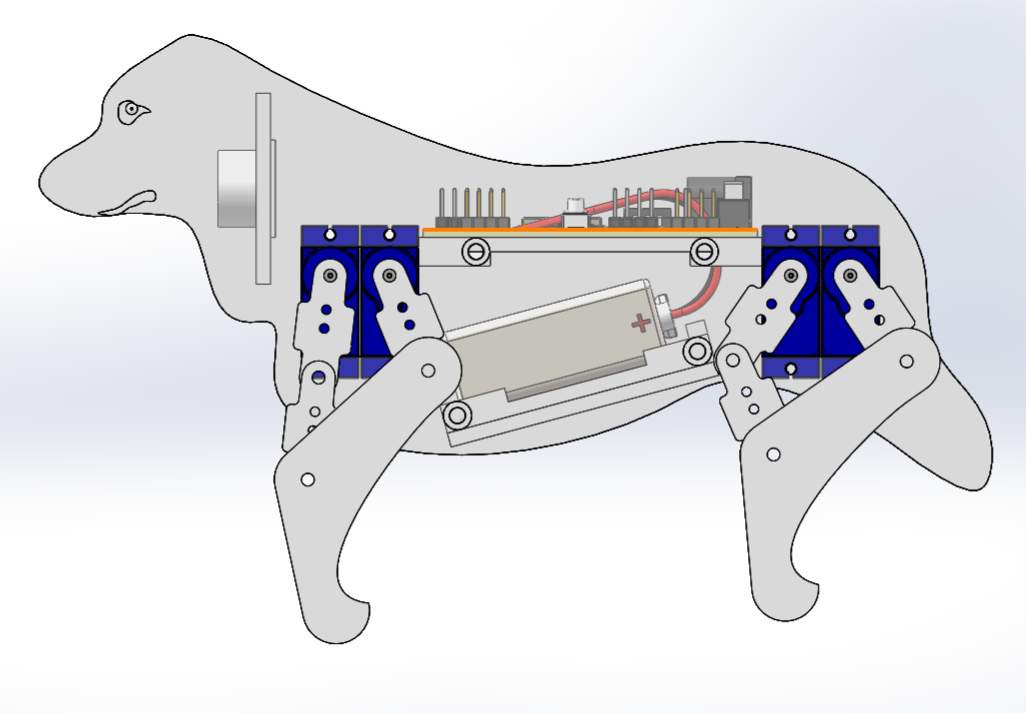
二、外形及结构设计
外形:
如何把外形设计得更像一只狗?首先你得有一只狗(可以直接从网上当下来),如:

然后,新建SOLIDWORK零件,在前视面插入草图。然后在工具——草图工具——草图图片……,把上面的图插入

把大小缩放到你认为合适的尺寸
然后,用多义线把外形描摹出来

再把舵机的安装孔画上(注意狗脚子的上关节位置要与舵机安装位置大致相当),这样外形就设计好了

结构:
结构上基本是按训练营给的尺寸做,但各连接部,尤其是关节,不能简单地用螺丝串过去,这样很难调节关节的松紧度,紧了动不了,松了会乱动。
所以各关节都用轴孔配合结构,轴的长度凸出0.2,孔的直径比轴大0.2

其它的连接,采用内嵌螺母的方法,保证结构牢固

三、PCB制作
当然是白嫖立创PCB免费打样和训练营的劵,前后打了三次样,每次都有不同的错误,幸好在焊接前及时发现,没有造成元器件的报废。这里主要提一点

在固件烧录成功后,发现I2C通讯错误,检查半天,发现SDA与地短路了,重新清理焊点后测3.3V正常,故障也就排除了。看到群里也有不少同学出现这个问题,通常都是SDA、SCL没有正确拉高(正常情况下测量应该是3.3V)。
四、程序烧录
程序烧录主要按训练营视频流程一步步来做,过程中也有不少坑,如不能用WIN7系统,不能安装太高版本的PYCHARM,不要纠结LINUX下CLION的安装,直接用原带的编辑器,一开始先不要自己改固件,直接用训练营提供的固件烧。
四、装配调试
PLA的打印精度实在不敢恭维,每个零件都要自己重新打磨一遍。
装配后的样子:

五、运行效果
见附件的MP4
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论