


2024电赛Ti杯三子棋
简介
24电赛三子棋,参加校赛最后评测出了点小问题。代码和机械都有很多要优化的地方,发出来抛转引玉,欢迎大家指点批评。
简介:24电赛三子棋,参加校赛最后评测出了点小问题。代码和机械都有很多要优化的地方,发出来抛转引玉,欢迎大家指点批评。开源协议
:GPL 3.0
描述
视频链接:
[B站视频]https://www.bilibili.com/video/BV18MZYYfE9p/?spm_id_from=333.1387.homepage.video_card.click&vd_source=c5264ed3939a6a674d4069dff1ca5d90
立创开源广场链接:(https://oshwhub.com/xu_duoduo/san-zi-qi)
github链接:(https://github.com/JourneyXuu/mitsuko-2024E)
项目简介
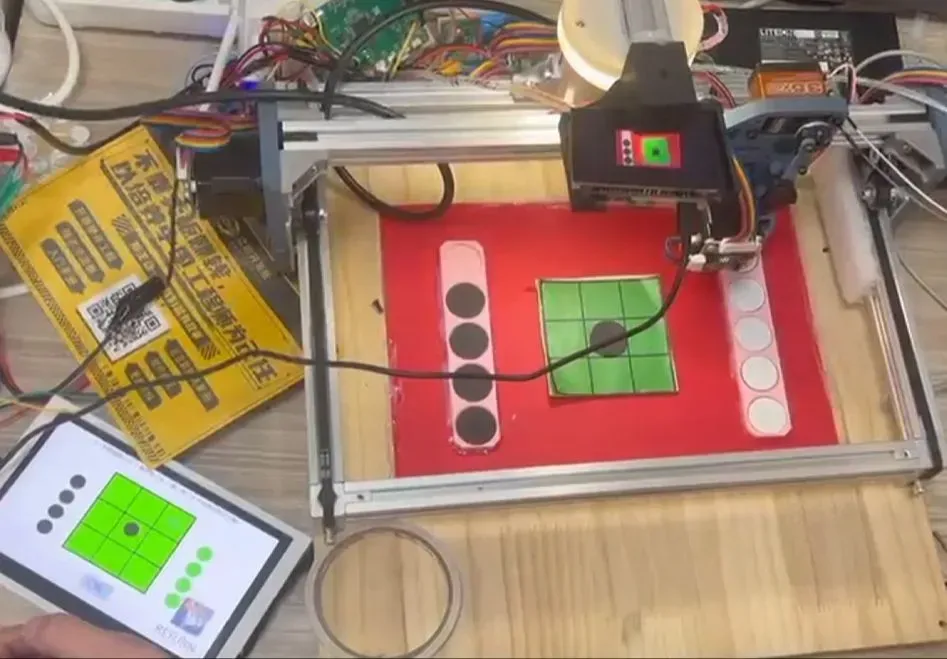
本系统采用模块化的设计思想,以STM32F407为中央处理器,由庐山派K230视觉模块、曲柄连杆、张大头闭环步进电机、舵机、龙邱电源模块、陶晶池串口屏、电磁铁。
原理解析(硬件说明)
此处可填写项目的设计原理,将设计的原理拆分解析,示例:
主控:STM32F407VET6(只引出了串口、CAN、I2C、定时器TIM1和ADC1的部分通道)
主控图片
拍的丑将就看一下

调试PCB遇到的问题
1.原本使用时舵机的电源和主控公共用1个5V,发现舵机启动电流过大,会导致舵机不工作,version1的PCB最后外部连接了龙邱的电源给舵机单独供电,现在提交的PCB已经修改为version2。
2.按键画错了,v1的按键焊接时全部拆除
3.预留的串口触摸屏没有用,直接用了陶晶驰的串口屏

分电板
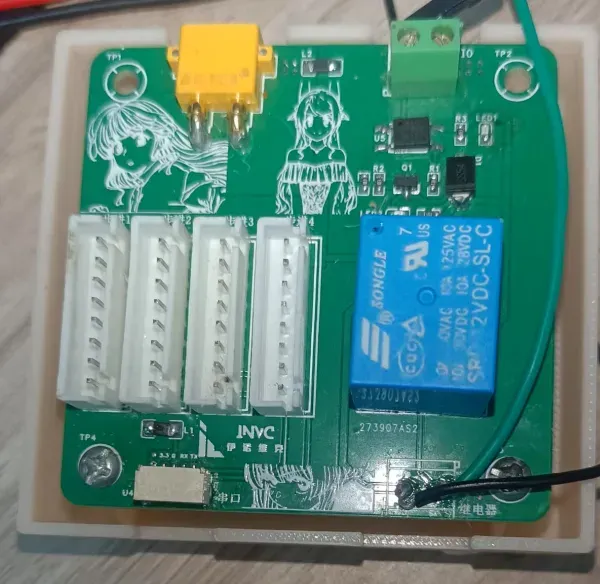 **分电线**
**分电线**

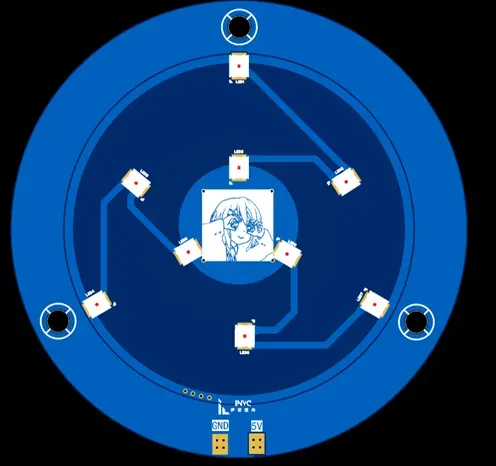
恒流源补光板
支出输入电压:3V-18V
灯太亮了,所以做了一个外壳挡挡光

供电结构图

下位机软件代码
软件代码结构

IO接线
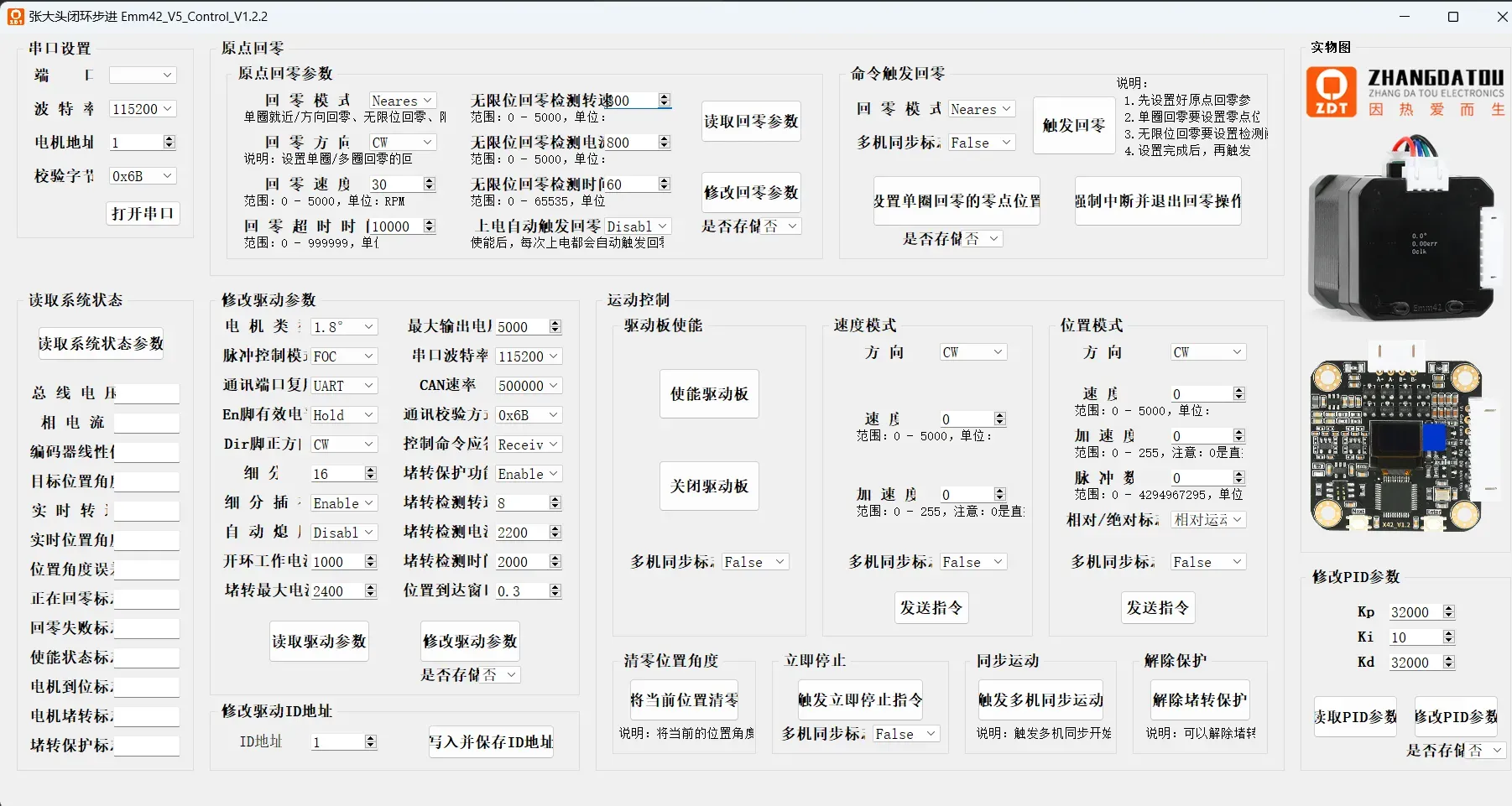
串口2控制步进电机
张大头的步进电机使用串口控制,使用多机同步,电机1、2必须同步
电机1、2使用多圈无限位碰撞回零操作说明
电机3使用单圈就近回零
在上位机中修改回零
/*
*@brief: 控制三电机运动x,y三轴
*note: 电机1、2控制x方向,电机3控制y方向
*@param: x_distance: 电机1、2运动距离
*@param: dir_X: 电机1、2运动方向
*@param: y_distance: 电机3运动距离
*@param: dir_y: 电机3运动方向
*note:如果发送失败则重新发送命令
*/
void control_t(uint32_t x_distance,uint32_t y_distance)
{
Emm_V5_Pos_Control(1, 0, velocity, acc, x_distance, raf, 1); Delay_Timer(10);while(!checkDelayTimer());// 多机同步标志位置1
Emm_V5_Pos_Control(2, 1, velocity, acc, x_distance, raf, 1); Delay_Timer(10);while(!checkDelayTimer());
Emm_V5_Pos_Control(3, 1, velocity, acc, y_distance, raf, 1); Delay_Timer(10);while(!checkDelayTimer());
Emm_V5_Synchronous_motion(0);
}
串口3解包陶晶驰
只有检测到包头和包尾的数据才修改数据
这里写的串口DMA接收写的不够好,可以修改为双缓冲区,不过本题很够用了
void TJC_UART_UnPack(uint8_t *dma_buffer)
{
uint8_t data;
for (uint16_t i = 0; i < MAX_PACKET_LENGTH; i++)
{
data = dma_buffer[i];
switch (tjc_rx_handler.state) {
case RX_WAIT_HEADER:
if (data == PACKET_HEADER) { // 检测到包头
tjc_rx_handler.index = 0;// 直接重置索引,不存储包头
tjc_rx_handler.state = RX_RECEIVING;
}
break;
case RX_RECEIVING:
if (data == PACKET_FOOTER) { // 检测到包尾
//检测到包尾时不存储包尾,直接进行数据有效性检查。
// 数据有效性检查(可添加CRC校验)
if (tjc_rx_handler.index >= 2) { // 最小有效包长度判断
Task_Flag = tjc_rx_handler.buffer[0];
Selected_Chess = tjc_rx_handler.buffer[1];
Selected_Board = tjc_rx_handler.buffer[2];
break_flag = tjc_rx_handler.buffer[3];
}
tjc_rx_handler.state = RX_COMPLETE;
} else {
if (tjc_rx_handler.index < MAX_PACKET_LENGTH - 1) {
tjc_rx_handler.buffer[tjc_rx_handler.index++] = data;
} else { // 数据超长处理
tjc_rx_handler.state = RX_WAIT_HEADER;
}
}
break;
case RX_COMPLETE: // 完成一帧接收后复位状态机
default:
tjc_rx_handler.state = RX_WAIT_HEADER;
memset(tjc_rx_handler.buffer, 0, sizeof(tjc_rx_handler.buffer));
tjc_rx_handler.index = 0;
break;
}
}
HAL_UARTEx_ReceiveToIdle_DMA(&huart3, dma_buffer, DMA_BUFFER); // 启用空闲中断接收
__HAL_DMA_DISABLE_IT(&hdma_usart3_rx, DMA_IT_HT);
}
上位机软件代码
K230实际跑起来帧率比较低,可以修改像素
MINIMAX算法
最后一题长按庐山派上的用户按键开启第六题,我们都用的最简单最笨的方法
哈哈,能用就行
def minimax(board, depth, is_maximizing):
computer = 'X'
player = 'O'
if check_win(board, computer):
return 10 - depth
if check_win(board, player):
return depth - 10
if check_draw(board):
return 0
if is_maximizing:
best_score = float('-inf')
for i in range(SIZE):
for j in range(SIZE):
if board[i][j] == ' ':
board[i][j] = computer
score = minimax(board, depth + 1, False)
board[i][j] = ' '
best_score = max(score, best_score)
return best_score
else:
best_score = float('inf')
for i in range(SIZE):
for j in range(SIZE):
if board[i][j] == ' ':
board[i][j] = player
score = minimax(board, depth + 1, True)
board[i][j] = ' '
best_score = min(score, best_score)
return best_score
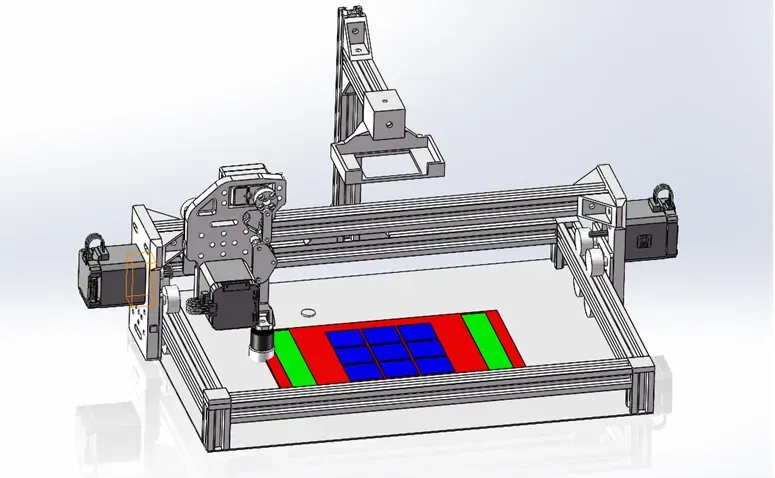
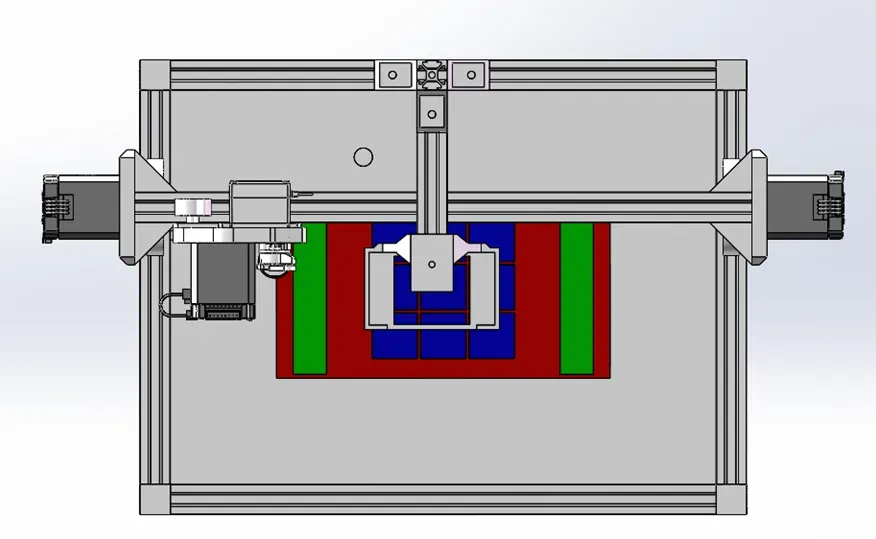
机械结构
有一个好的机械手可以帮大家省去很多麻烦
本设备使用的十字滑台,由3个步进电机和传送带组成,结构如图3所示。步进电机A和步进电机B保持同速转动,可实现上下方向的移动,步进电机C保持同速转动,可实现左右方向的移动。
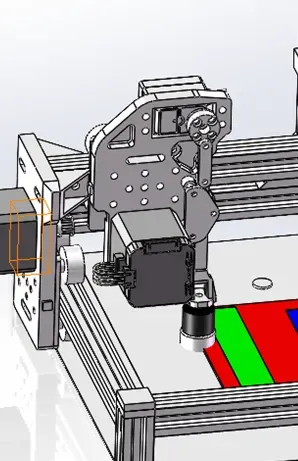
舵机连杆操作
注意事项
- 准备一个电源来调,免得步进疯了撞来撞去
- 分电板可以自己改改,加个开关
- 代码太多了,自己看看吧
鸣谢
没有躺赢狗,大家都是MVP,感谢一起陪伴做比赛,很珍惜这段时间
电控、硬件(up本人): @xuduoduo
视觉算法:@Gone with the wind
机械:@是祺不是琪
实物图
此处可放入组装完成后完整实物图
图1:v1版本的PCB:(目前已修复大部分错误,打板最新的就行)
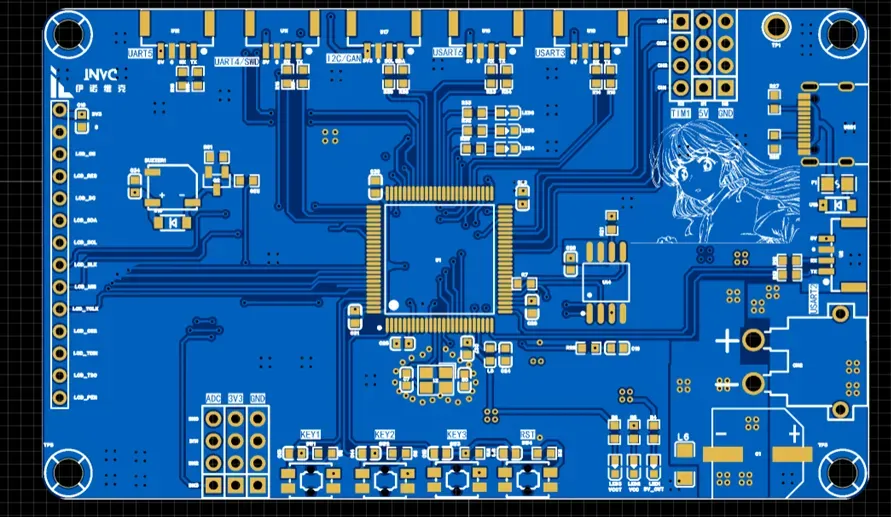
图2:分电板PCB(没咋改过)
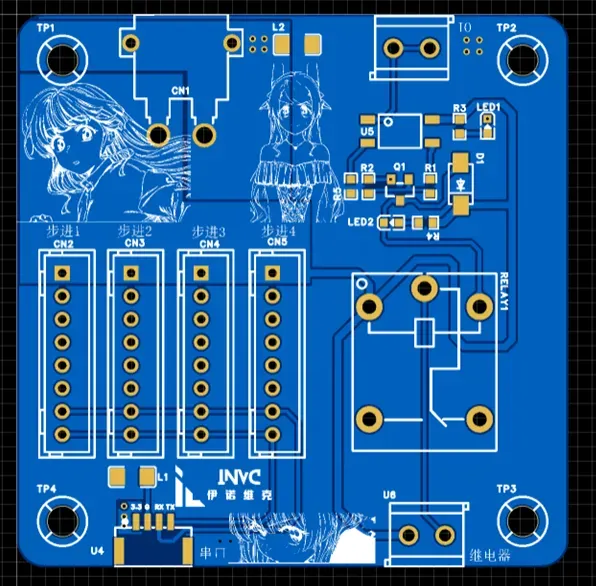
图3:呆唯补光板
设计图
BOM
 克隆工程
克隆工程 暂无相关工程
暂无相关工程
评论