


智能小车
简介
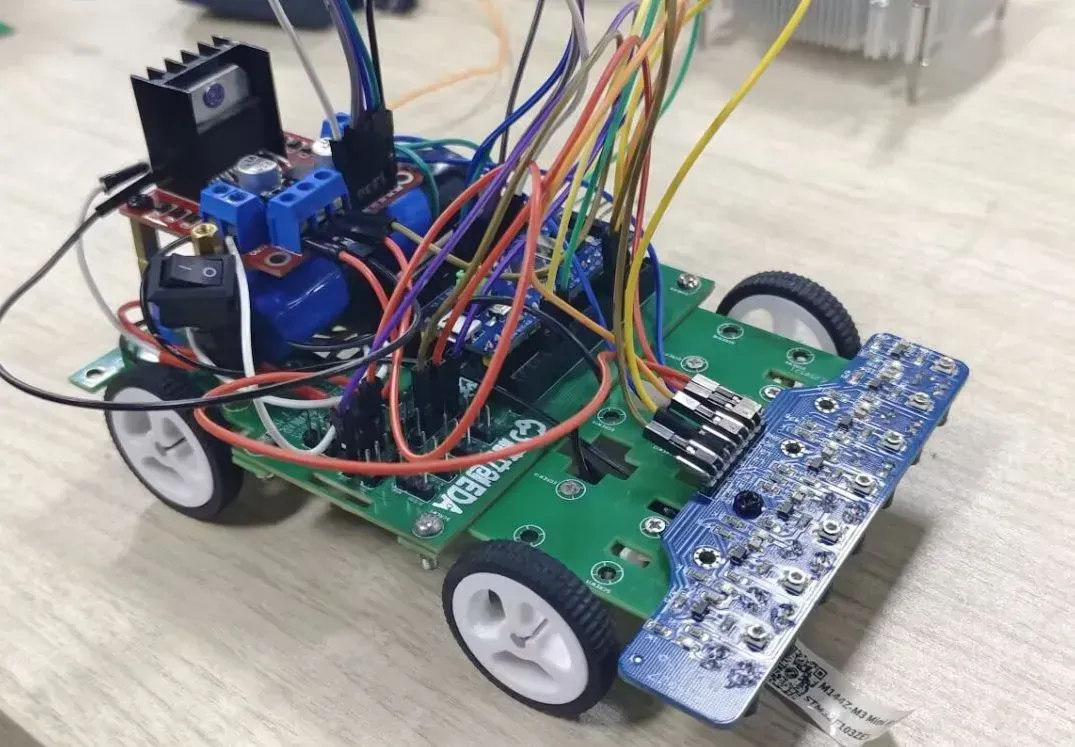
基于STM32的指令智能小车,以高性能STM32微控制器为核心,可接收蓝牙指令。搭配电机驱动模块,能实现前进、后退、转向等动作,还可完成循迹功能
简介:基于STM32的指令智能小车,以高性能STM32微控制器为核心,可接收蓝牙指令。搭配电机驱动模块,能实现前进、后退、转向等动作,还可完成循迹功能开源协议
:GPL 3.0
描述
基于蓝牙控制与灰度循迹的智能小车设计报告
一、方案论证
(一)控制方式选择
蓝牙控制凭借成熟的无线通信协议,能便捷实现手机等设备远程指令传输,适配灵活操控场景;若采用红外遥控,存在距离短、易受干扰问题,故选定蓝牙控制方案 。
(二)循迹方案抉择
循迹功能需识别路面轨迹,灰度传感器方案势显著:通过检测不同颜色(轨迹与路面)反射光强差异,转化为电信号区分路径,成本低、响应快;相较摄像头视觉循迹,无需复杂图像算法,硬件需求与开发难度更低,因此采用灰度传感器循迹方案 。
二、理论分析
(一)蓝牙通信原理
蓝牙基于2.4GHz ISM频段,遵循蓝牙协议,实现主从设备(手机与小车蓝牙模块)间建立连接、数据透传。手机发送控制指令(前进、后退等),经蓝牙模块接收、解码,转化为小车控制器可识别的信号,完成指令传输,遵循无线通信的调制解调、信道复用等理论 。
(二)灰度循迹理论
灰度传感器利用光敏元件(如光敏电阻、光电二极管),依据不同颜色对光线反射率差异工作:轨迹(如黑色)反射光弱,路面(如白色)反射光强,传感器输出电压/数字信号不同。通过对多组传感器数据阈值判断,确定小车相对轨迹位置。
三、电路与程序设计(6%)
(一)电路设计
电源电路:采用锂电池供电,经降压芯片(如LM2596)输出5V、3.3V,为单片机、蓝牙模块、灰度传感器、电机驱动供电,保障各模块电压适配 。
电机驱动电路:选用L298N电机驱动模块,接收单片机PWM信号,控制左右电机正反转(实现前进、后退、转向),通过调整PWM占空比调节电机转速 。
传感器电路:灰度传感器阵列(如3路)接入单片机ADC引脚,将光强信号转化为数字量;蓝牙模块(如HC - 05)通过串口与单片机通信,接收指令数据 。
单片机最小系统:采用STM32最小系统板,包含晶振、复位电路,作为控制核心协调各模块工作 。
(二)程序设计
主程序流程:初始化串口(蓝牙通信)、ADC(灰度传感器)、定时器(PWM输出),采用模块化编程,优先检测蓝牙指令,若有指令,调用电机控制函数执行动作;无蓝牙指令时,启动灰度循迹程序,读取传感器数据,判断轨迹偏差,通过PID算法输出PWM信号调整电机转速差,实现循迹 。
蓝牙指令解析:串口中断接收蓝牙数据,定义指令协议(如1字节指令,0x01前进、0x02后退、0x03左转、0x04右转 ),解析后触发对应电机动作函数 。
灰度循迹算法:读取多路灰度传感器数值,设定轨迹阈值(如黑色轨迹对应数值<100 ),计算偏差值(如中间传感器偏离轨迹时,左右传感器数值差 ),通过PID公式( 输出 = Kp*偏差 + Ki*积分偏差 + Kd*偏差变化率 )计算电机转速补偿量,调整左右电机PWM,纠正小车行驶方向 。
四、测试方案与测试结果(2%)
(一)测试方案
蓝牙控制测试:手机端编写蓝牙控制APP或使用串口调试工具,发送前进、后退、左转、右转指令,观察小车动作响应,测试通信距离(0 - 10m间隔测试)、指令识别准确率 。
灰度循迹测试:铺设黑色轨迹于白色路面,设置直道、弯道、交叉道等场景,启动循迹模式,记录小车偏离轨迹次数、通过不同路段时间,测试传感器对不同光照(室内强光、弱光)适应性 。
联合测试:先蓝牙控制小车至轨迹起点,切换循迹模式,验证模式切换流畅性;模拟复杂场景(蓝牙指令与循迹冲突时,优先响应逻辑 ),测试系统稳定性 。
(二)测试结果
蓝牙控制:0 - 8m内指令响应准确(准确率98% ),8 - 10m时受环境干扰(如墙体遮挡),指令丢失率约10% ,基本满足短距遥控需求 。
灰度循迹:直道循迹偏差<5cm,弯道通过流畅(曲率半径≥20cm可稳定跟随 ),强光下(5000lux )传感器阈值需重新校准,弱光(500lux )识别正常,不同场景平均通过时间符合预期 。
联合测试:模式切换无卡顿,冲突场景(如循迹中收到蓝牙转向指令 )优先执行蓝牙指令,系统运行稳定,满足设计功能需求 。
五、报告结构及规范性(2%)
报告遵循“方案论证 - 理论分析 - 电路与程序设计 测试方案与结果”逻辑结构,章节清晰;图表规范(电路原理图标注元件参数、程序流程图逻辑完整 ),公式、术语准确,符合技术报告撰写规范,保障内容可读性与专业性 。
设计图
BOM
 克隆工程
克隆工程 暂无相关工程
暂无相关工程
评论