


ESP32S3_PX4小飞机
简介
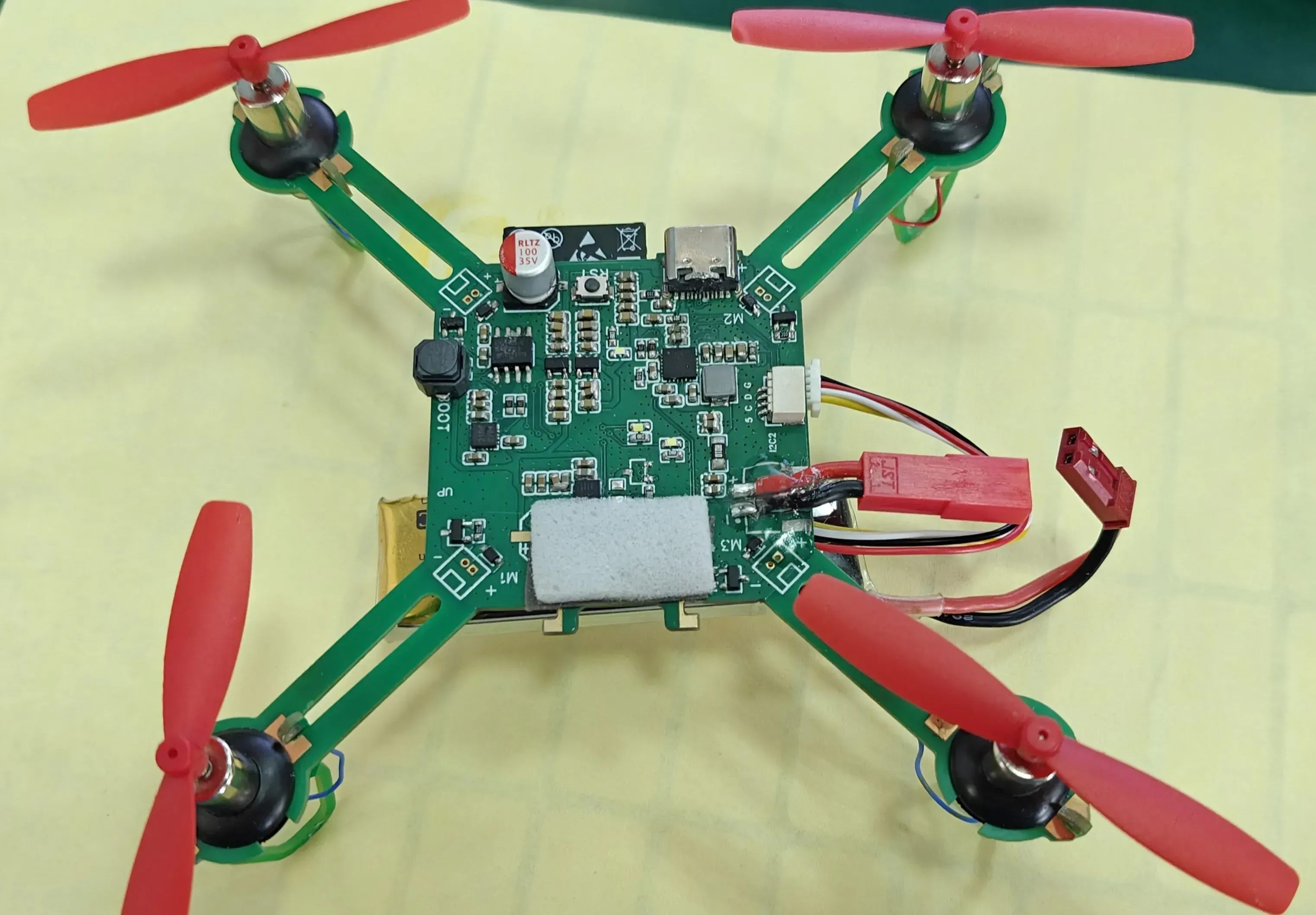
使用ESP32S3的基于PX4固件的小飞机
简介:使用ESP32S3的基于PX4固件的小飞机开源协议
:GPL 3.0
描述
使用ESP32S3的基于PX4固件的小飞机,硬件设计来自于https://github.com/espressif/esp-drone,固件将发布在https://github.com/w2016561536/PX4-Autopilot/tree/px4_esp32s3,目前已测试悬停与自动降落和一些手动控制的飞行。最新固件直达:https://github.com/w2016561536/PX4-Autopilot/releases/tag/v1.14.3-rc7
注意事项:
1、请不要随意把循环频率改高,ESP32S3的机能有限。(无光流最高400HZ GYRO_RATE,200HZ IMU_INTEG,有光流最高200HZ GYRO_RATE, 100HZ IMU_INTEG).
2、充电时务必有人看守!!!!重要,必须有人看守!!!!并移除周围的可燃物,充电电路并未做过严苛测试,无法保证其稳定性(特别是DIY)
3、如果外挂传感器是3.3V供电,建议从ESP32S3附近的电容飞线,不要从SENSOR_3V3上飞线。
4、由于没地方塞5.1K电阻,不支因此持CtoC的数据线。
5、飞行时请遵守法律法规,不要超视距飞行。
6、配置的wifi ssid: MY_PX4 密码:12345678
7、IP配置:地址:10.0.0.4,网关:10.0.0.1,子网掩码: 255.255.255.0(对应网络前缀24)
8. 电机配置里,记得把输出模式改为oneshot,油门 disarm值设置为0,最小值设为100,最大值2000到2100,否则一拉油门就重启。
10、我使用的是720电机,使用的护线圈固定,可以使用8250电机,但需要自己设计夹具。
12、支架可以用PCB1中自带的(需要自己裁切),也可以3D打印(stl模型见附件)
13、如果没有遥控器,可以在QGC的application settings里打开虚拟手柄。
14、飞机支持SBUS遥控器,使用时将SBUS线接到UART2 RX上,并且在参数表中修改RC_PORT_CONFIG为Radio Controller,UART2_RX_INV设定为Enable。
15、IP5109的充电电流可设定,参数为BAT_CHG_CURRENT,单位毫安,最大不超过2A.
16、程序烧录:前往固件发布页面Release:https://github.com/w2016561536/PX4-Autopilot/releases,烧录教程在Release页面内有。
17、如果PCB1审核人员认定拼版,就去打PCB1_1,唯一的区别是PCB1_1缺少脚架,需要自己额外自制脚架(如3d打印,STL在附件)。
18、PCB2是自制的串口工具,可以方便的连接飞机的串口,按需制作。
目前存在的问题:
4、USB由于缓冲区问题不稳定,因此USB接口只能用于烧录程序和充电
设计图
BOM
 克隆工程
克隆工程 暂无相关工程
暂无相关工程
评论