


专业版
OPENMV-STM32G431 DUAL-CONTROLLER
740
0
0
2
简介
RM2025飞镖镖体飞控硬件开源
简介:RM2025飞镖镖体飞控硬件开源开源协议
:GPL 3.0
创建时间:2025-04-03 04:03:32更新时间:2025-04-05 05:51:37
描述
前言
该开源中的内容展示了笔者在2025赛季中完成的大部分工作,由于今年没有UC打了,所以开源最近研发的成果给大家参考,希望能对大家有所启发。
首先,在RM25赛季的新规则中,官方对于制导飞镖的导向意图越来越明显,且飞镖本身带来的收益也是巨大,每击中一发基地镖都会给团队带来极高的收益,故研发制导飞镖收益很大!
本开源主要讲解镖体制导硬件部分的相关设计思路,希望能给大家带来启发,硬件可能存在某些问题,目前也在迭代的过程中,也欢迎大家多多交流想法!
方案分析
目前主流的有控镖硬件研发分为以下几种:
-
成品开发板/飞控+成品视觉模块+成品电源模块+自制PCB底板
-
此方案的优点是研发时间短、上手难度低、更换备件方便,缺点便是开发板成本较高、灵活性较低,难以缩小体积
-
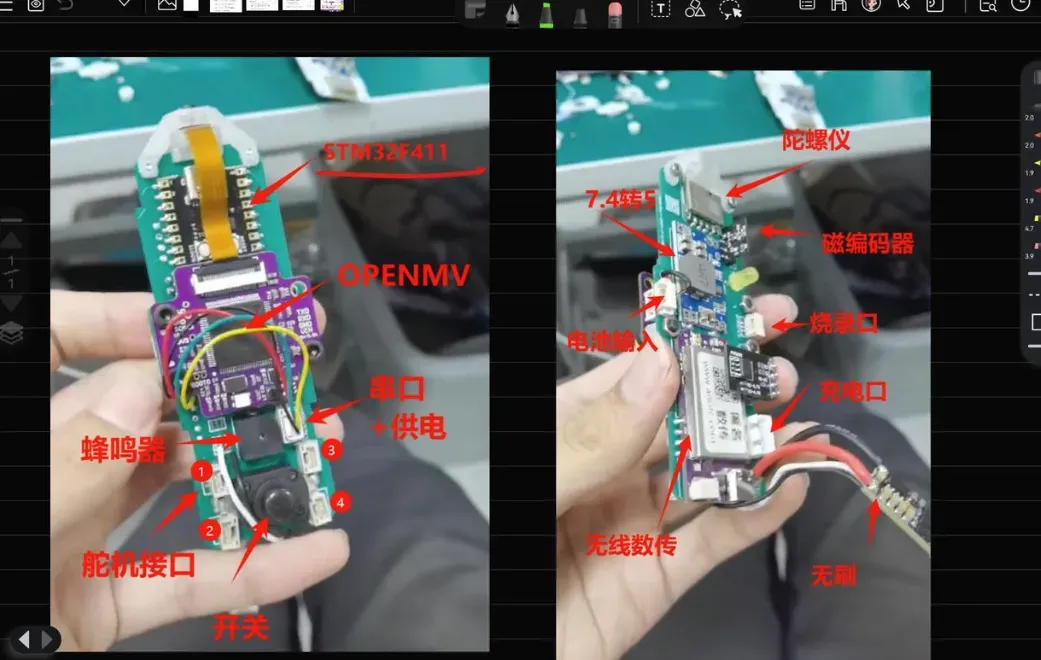
如大工在RM24的开源中使用的便是STM32F411开发板+OPENMV4开发板+成品电源模块等,可以看到其体积难以控制整体会非常大。
-
-
此方案优点是自由度高、集成度高、成本可自行控制,缺点是PCB设计难度高、焊接难度高、需要很长时间,后两个问题可通过SMT解决,实际SMT平均下来,成本会比购买成品方案要更低。全自研
基于此,笔者决定采用全自研的方案,放弃使用成品模块(硬件佬特有的把硬件小型化的执念罢了),镖体的机械部分拓扑结构采用跟大连理工大学RM24的飞镖一致,但有不同的是当时机械希望此镖体能够兼容摩擦轮,故真正对外的接口都采用直插的元件。
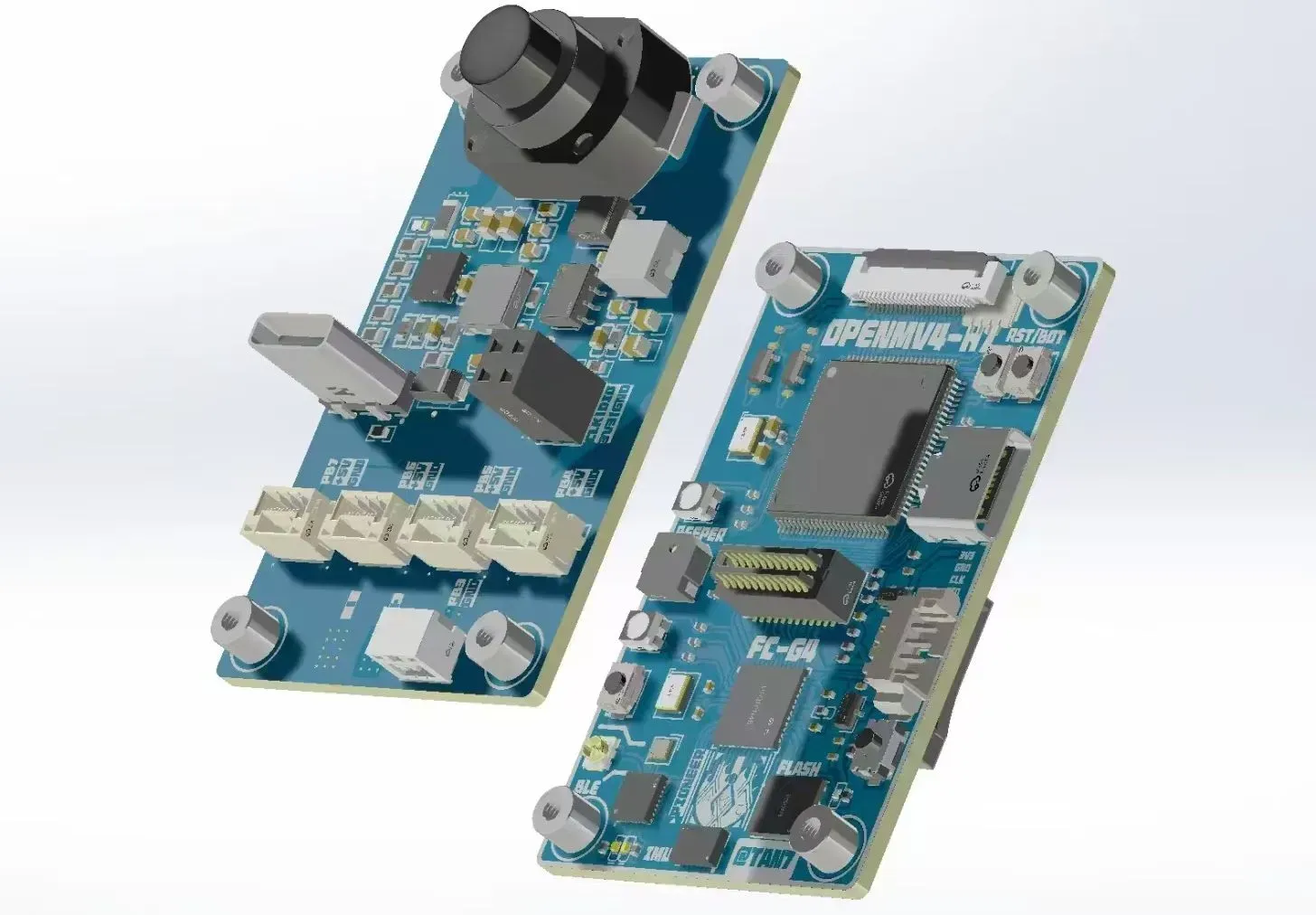
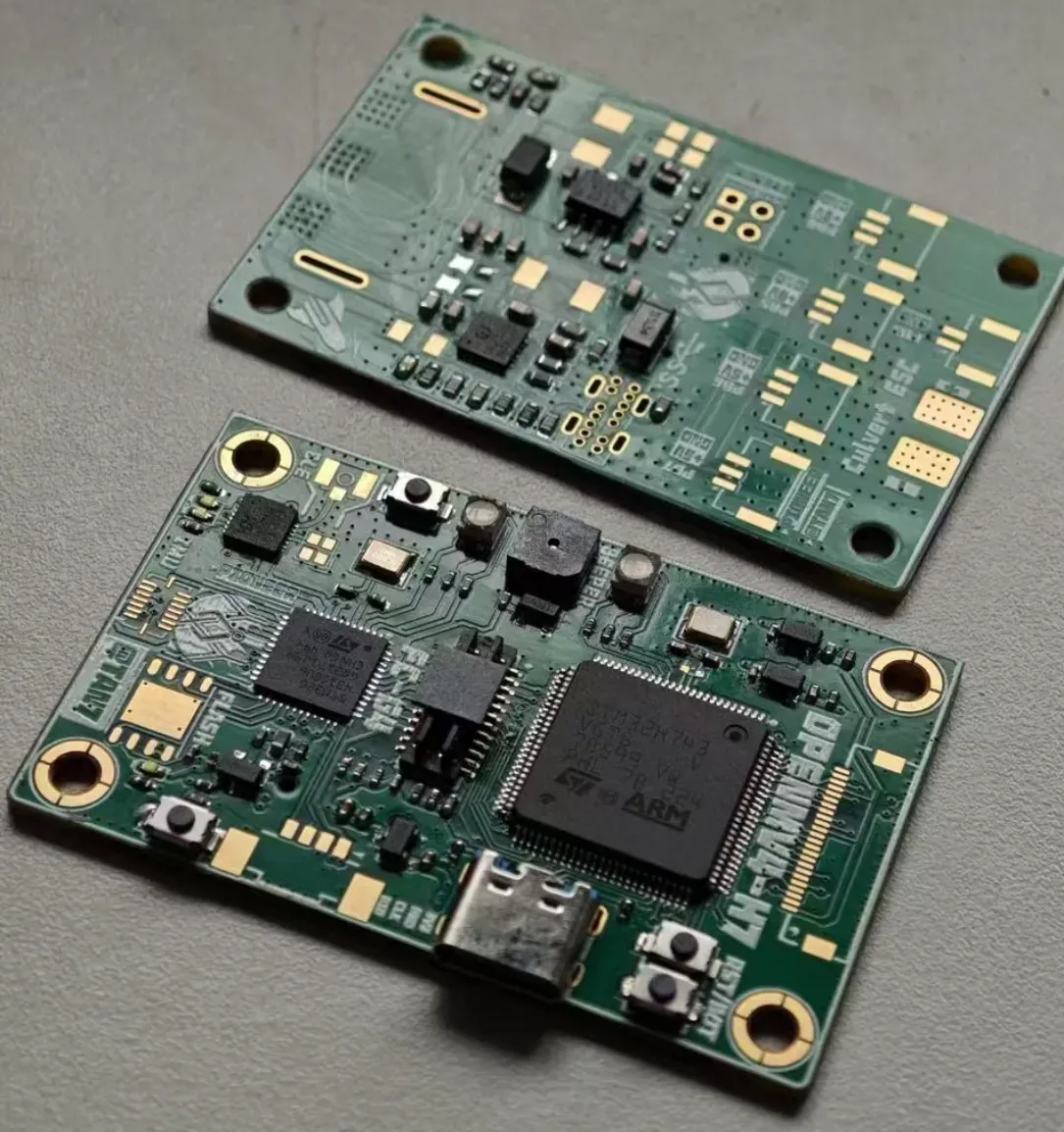
由于整体硬件体积需要尽可能的小,所以采用功率板+控制板的“双层”板的方案,功率板主要是2S锂电池充电电路+DCDC电路+无刷涵道+四路舵机,主控板包括视觉识别+蜂鸣器+陀螺仪+无线串口+FLASH,主控方案STM32G431+STM32H743。
迭代过程
一开始参考大工的思路,全部使用成品模块,且充分模块化设计,但由于成品太大了,不符合机械的设计需求,所以重新设计新一板电路。且在设计的时候,一开始使用的是正点原子K210模块,此模块使用的是M.2金手指的方案,在实际硬件设计的过程中发现金手指所需要占用的地方太大了,且K210对摄像头的兼容性不够,无法满足实际需求;后面在经过实际测试后,发现OPENMV4经过优化后可轻松跑到120帧+,故故后面决定使用OPENMV。
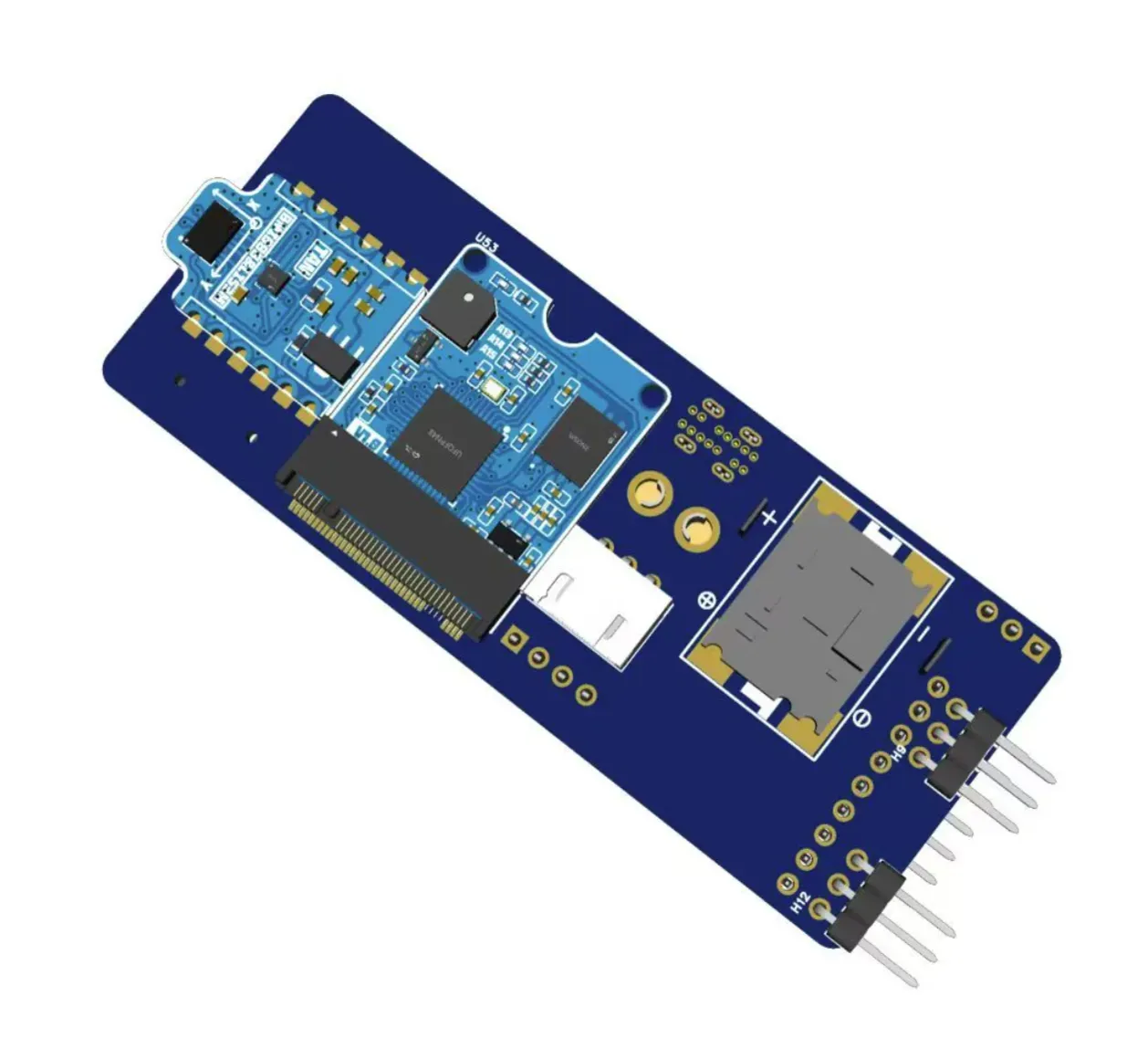

接下来的设计思路便是往小型化去设计,由于笔者常使用STM32G431(170Mhz,128Kbflash),相比较大工的STM32F411(100Mhz,1Mbflash)有更高的性能,且这两个芯片的价格非常接近,经过实测战队的步兵完整代码仅占用100Kbflash左右,故飞镖有128Kb的flash完全足够,综合衡量下最终选择了G431,控制板本身也搭载了完整的调试接口,不需要接入功率板也可以独立使用。无线串口使用的是CH9143+IPEX1代天线端子,1MBps的波特率+100M的最大距离足够日常调试。
由于需要将开口朝上,故将控制板的烧录+调试typec都通过板对板连接器连到上功率板,同时此typec也可以作为锂电池充电接口使用,充电的芯片采用的IP2326,其本身可以支持QC协议对锂电池进行快充(能到10W左右),但由于需要占用typec的DP和DN引脚,故舍弃其快充功能,实测也能有1-2W的充电功率,飞镖的电池也不大,故也不太关注充电的功率。
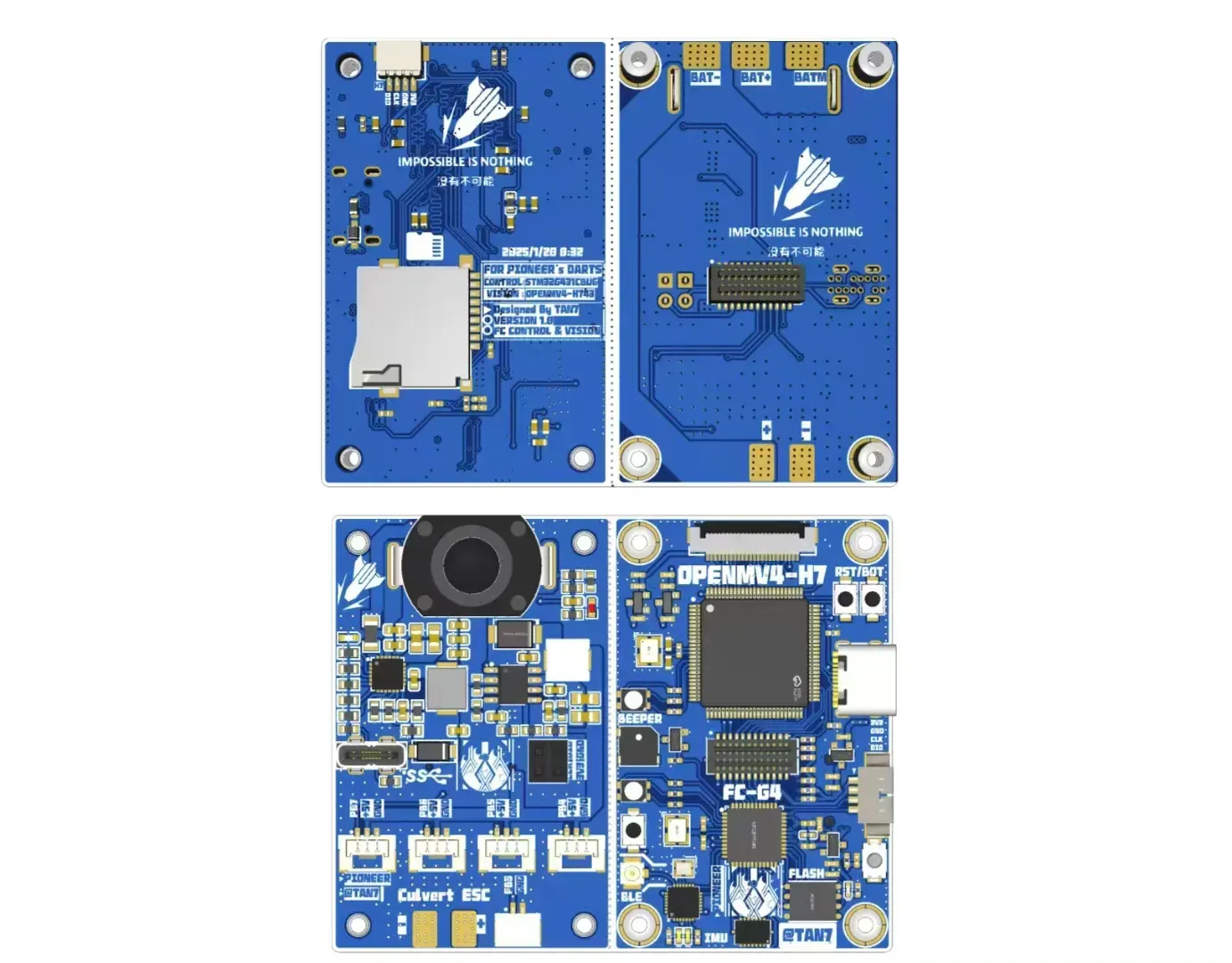
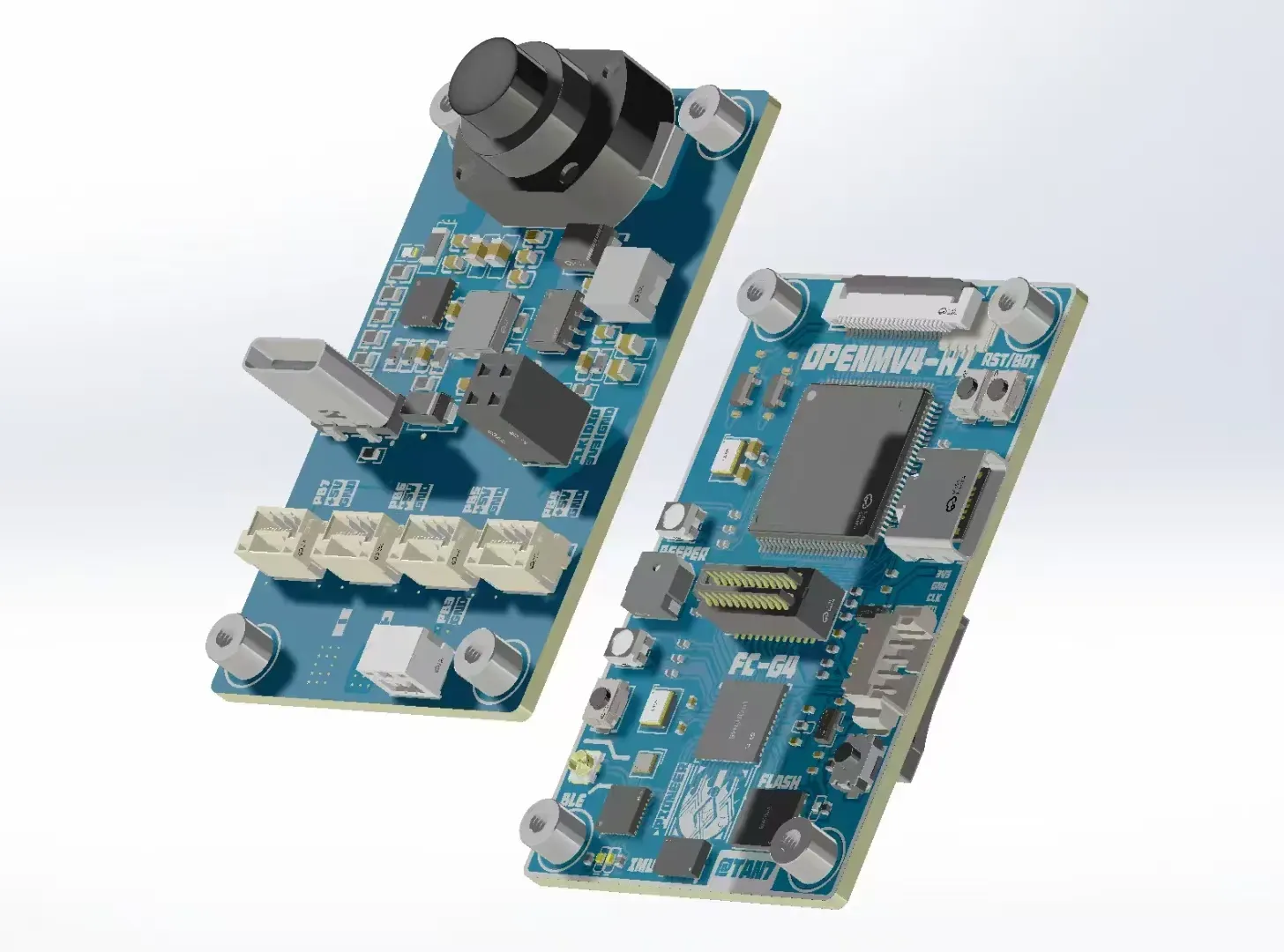
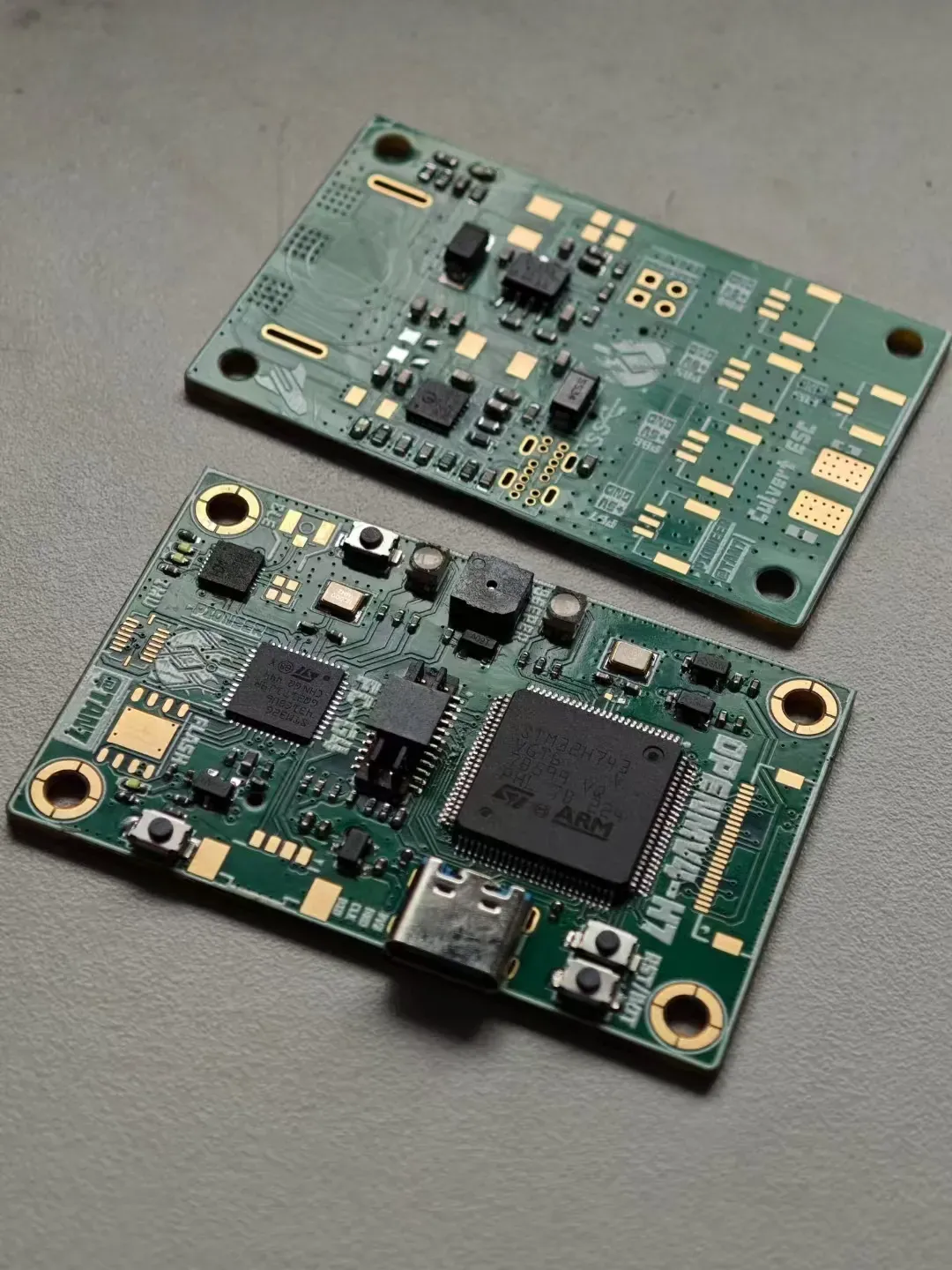
最终效果如图:

需要优化的点
-
电池的连接方式不够好,虽然最终硬件也能塞得下,但会很勉强,实际更推荐的连接方式为从上到下:控制板功率板-电调、舵机电池
-
还不够小
-
焊接难度有一点点高(
-
由于新镖架、新飞镖没弄出来,硬件的稳定性待测试
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
工程成员
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论