



专业版
HeadTracker_ESP32 nano无线头追
413
0
0
3
简介
一款超级小、集成度高的无线头追。搭配视频眼镜,可将头部的运动姿态解算后输出PPM信号,发送给遥控器。 通常用于航模上,控制第一人称视角的云台,实现云台跟随头部动作运动。
简介:一款超级小、集成度高的无线头追。搭配视频眼镜,可将头部的运动姿态解算后输出PPM信号,发送给遥控器。 通常用于航模上,控制第一人称视角的云台,实现云台跟随头部动作运动。开源协议
:GPL 3.0
创建时间:2024-07-17 16:17:30更新时间:2025-03-31 01:44:39
描述
项目简介
一款超级小、集成度高的无线头追。主控采用ESP32。
搭配视频眼镜,可将头部的运动姿态解算后输出PPM信号,发送给遥控器。
通常用于航模上,控制第一人称视角的云台,实现云台跟随头部动作运动。
项目功能
目前需要搭配接收端才能工作。后续软件更新计划支持遥控器蓝牙连接和 ELRS 无线头追连接功能。
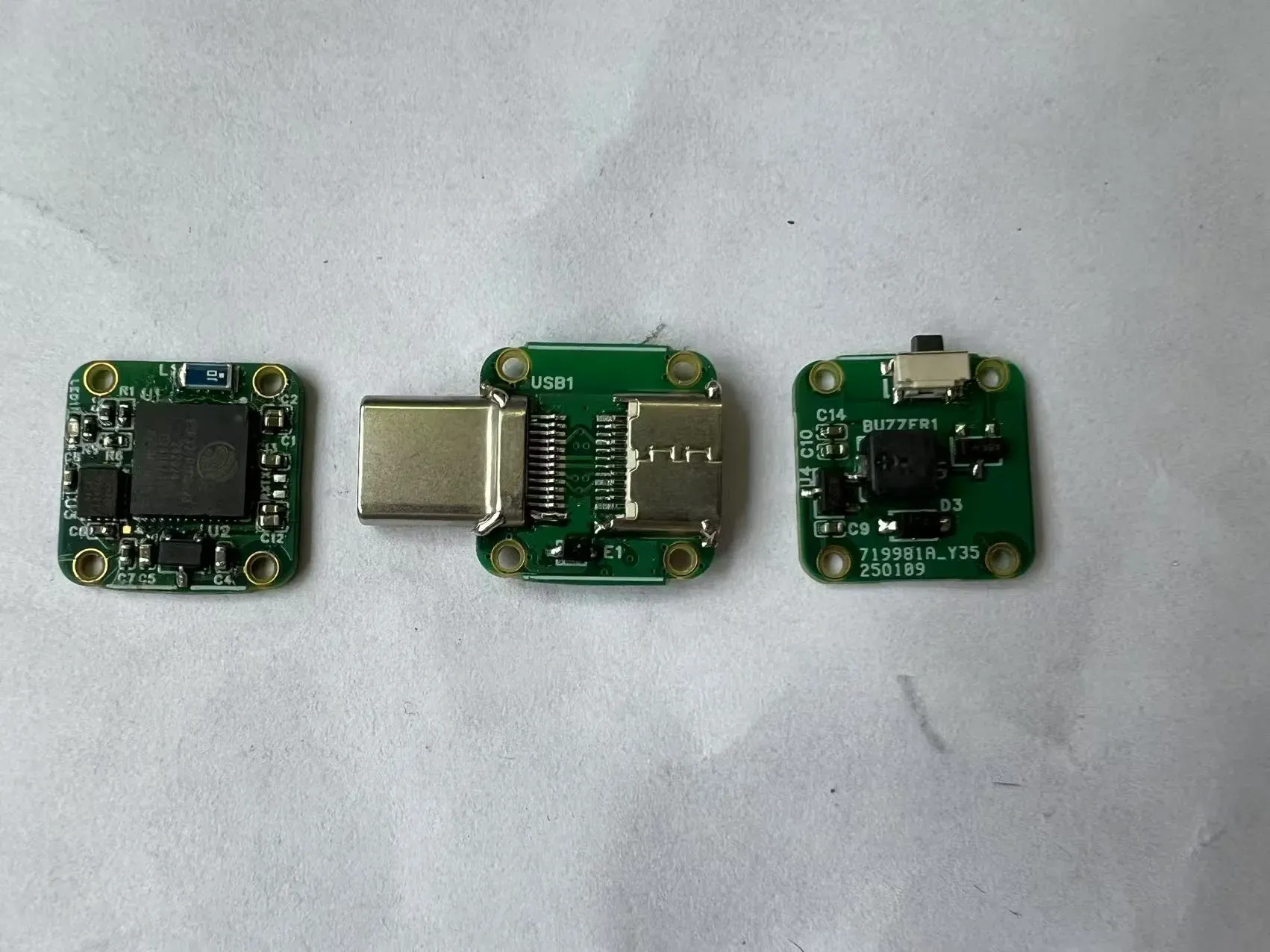
发射端
- 大小仅有 15 mm * 15 mm * 8 mm 大小(不包含伸出的 Type-C 头)。
- 即插即用,无需电池,无需提前安装魔术贴(需要有 Type-C 电源输出能力的视频眼镜,如 DJI G2,否则需要另外供电)。
- 双头 Type-C ,头追使用时,不影响手机与眼镜的连接,依然可以通过手机观看图传画面( DJI 系列)。
- 使用 esp-now 议与接收端进行纯无线连接。
- 蜂鸣器提示音。
- 电容触摸按键。
- 短按回中,长按固定姿态。
- OTA 升级固件。
接收端
- 大小仅有 34 mm * 17 mm * 9 mm 大小(不包含天线长度)。
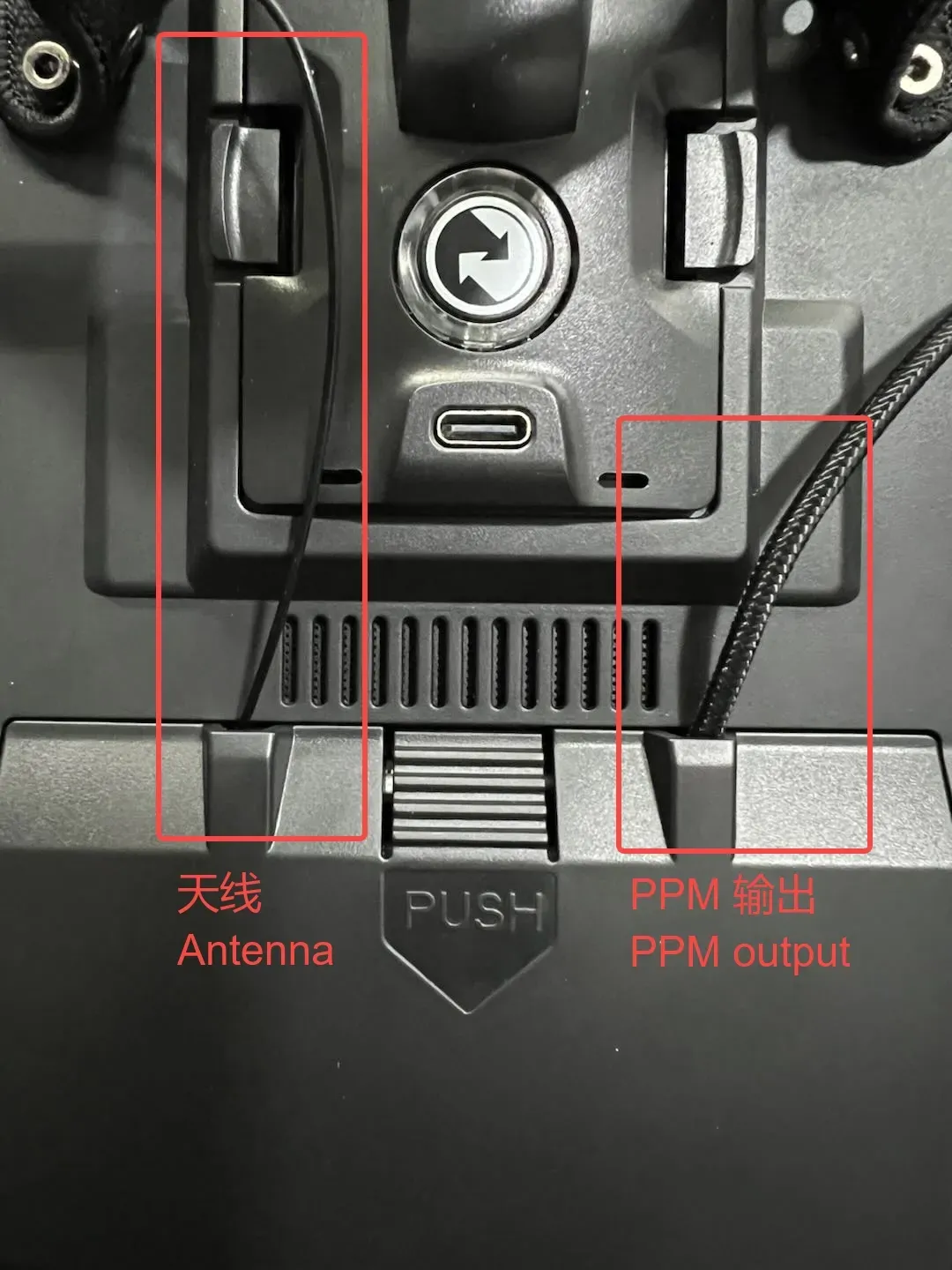
- 使用 3.5 mm 耳机线与遥控器教练口进行连接。
- 可共用遥控器上的 2s 电池进行供电,通过平衡头取电。
- PPM 信号输出。
软件代码
https://github.com/NineDayCC/HeadTracker_ESP32
文档
详细的文档,包括使用方法、制作过程等,请查看https://docs.nineday.cc/projects/headtracker-esp32/zh-cn/latest/index.html



设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
工程成员
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论