


【星火计划】MOONPILOT H743 飞控&电调 套装
简介
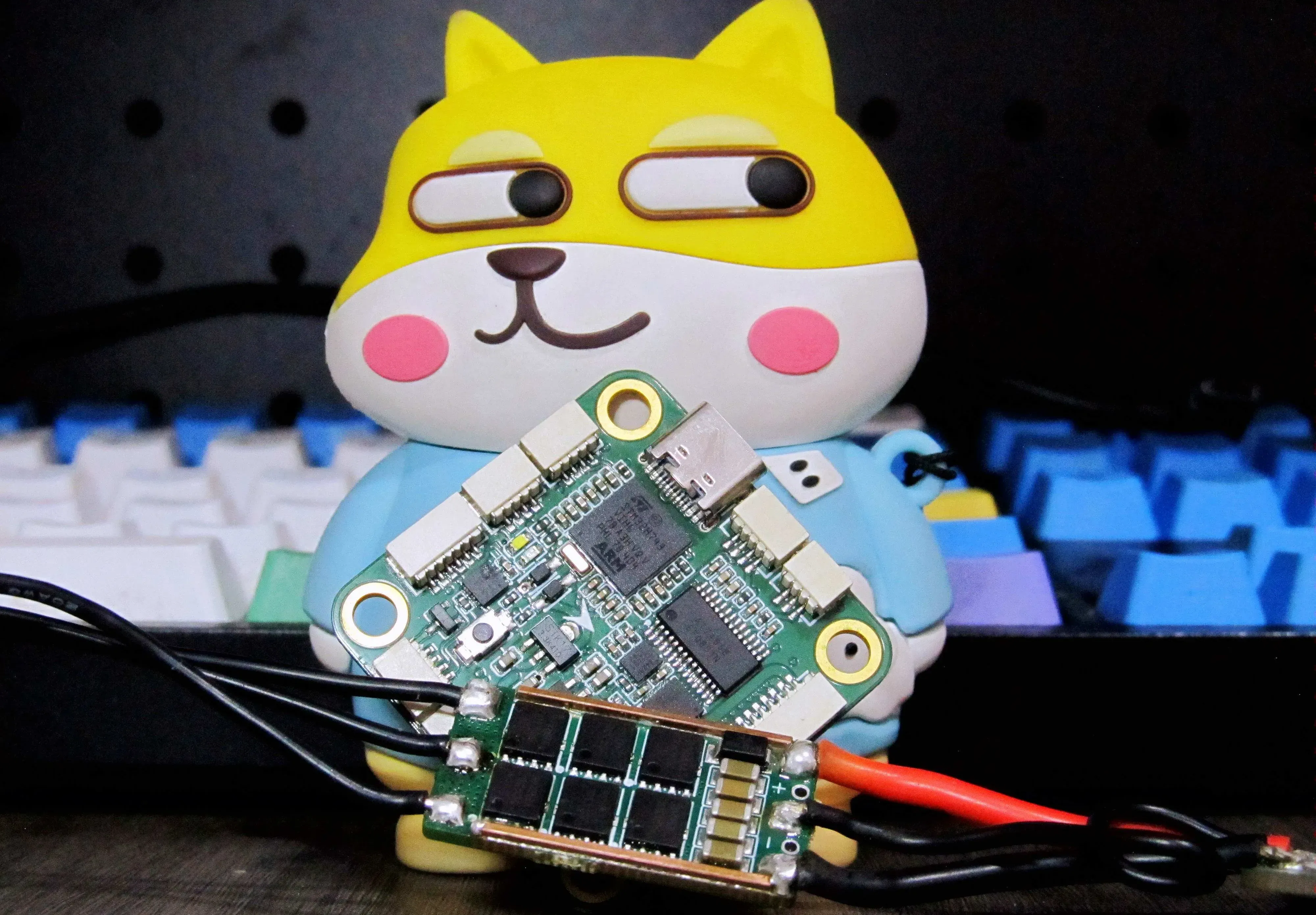
MoonPilot 是一款使用STM32H743VIH6单片机的一款飞控,主控频率高达480MHz,采用上接插件下焊盘设计,接口丰富。同步设计了分电板和单体电调并配备3D打印外壳。
简介:MoonPilot 是一款使用STM32H743VIH6单片机的一款飞控,主控频率高达480MHz,采用上接插件下焊盘设计,接口丰富。同步设计了分电板和单体电调并配备3D打印外壳。开源协议
:CC BY-NC-SA 4.0
(未经作者授权,禁止转载)描述
别催了!更新啦!电调更新啦!
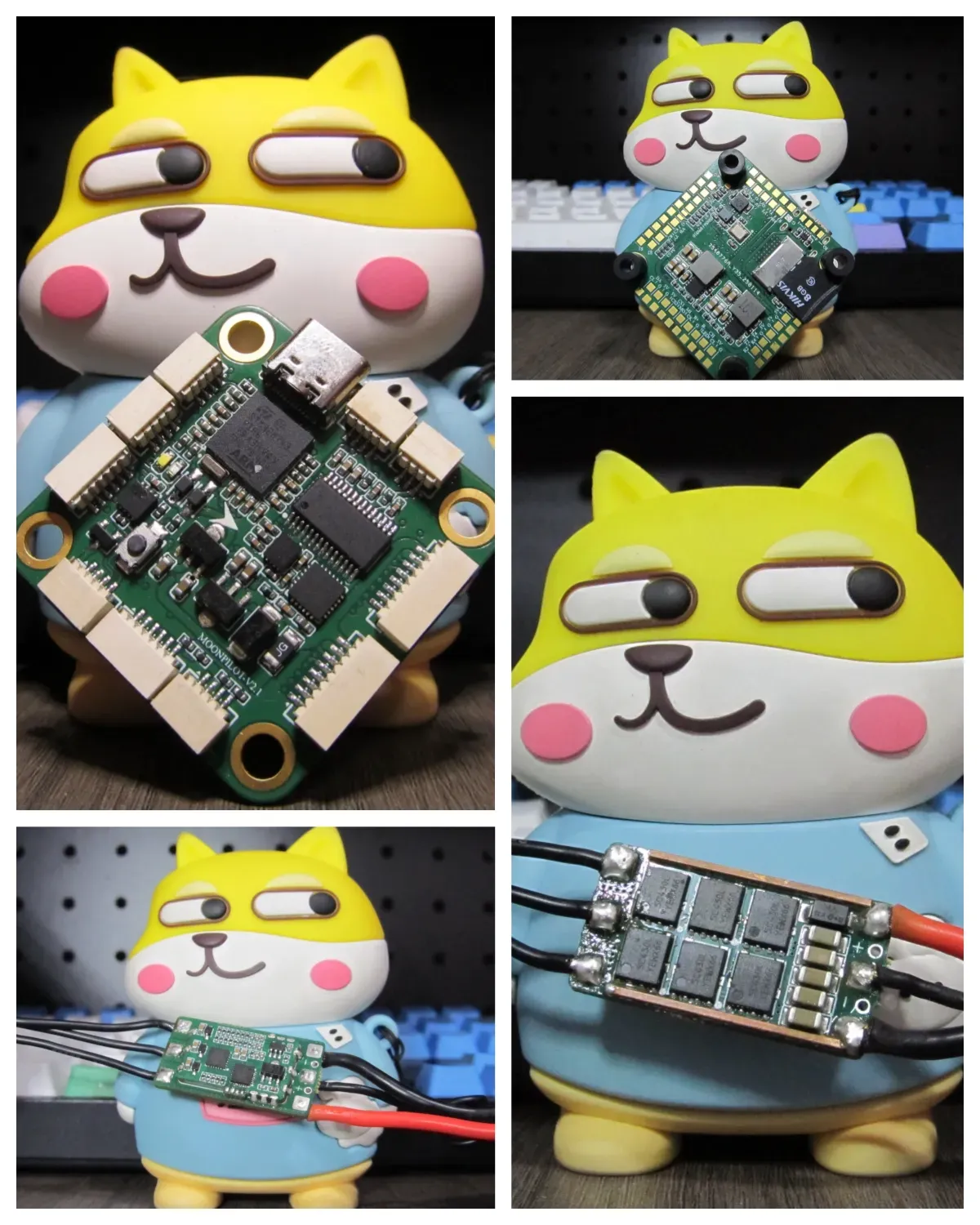 图1 MoonPilot-FC-ESC 套装 实拍图
图1 MoonPilot-FC-ESC 套装 实拍图
1 写在开头的话
- 作者长期以来从事飞控导航算法相关工作,先后使用过PIXHAWK-2.4.8(国产山寨版)、匿名飞控、PIXHAWK-4等。在分析了BETAFLIGHT开源代码后,参考MATEK-H743飞控的引脚设计(本硬件可直接刷 MATEKH743 固件,以实现部分基础功能),完成了MoonPilot的初步设计工作,后经优化和升级,形成了现在的版本;
- 此飞控套装在硬件上一步到位,不挤牙膏,为同学们的算法设计提供了较大的算力冗余(EKF、UKF、ADRC等),片上 2MB FLASH,即使部署RTOS也游刃有余,同时设计了SWD接口,方便同学们对飞控软、硬件进行调试;
- 在设计IMU电路时,考虑到不同网友的需求,特设计了两种不同的PCB方案,供飞友自行选择;
- 如果对该飞控的是设计存在疑问,欢迎评论区讨论。如果有硬件大佬也欢迎对该飞控的设计进行评审;
- QQ群:588411517(MoonPilot 交流群) 。
2 开源协议
本硬件设计在CC-BY-NC-SA 4.0协议下发布,仅供爱好者DIY学习交流使用,未经本人许可严禁任何形式的商业使用及贩卖。本设计按原样提供,不提供任何形式的工作保障/售后保修,不对任何因产品设计、操作不当以及违反当地法律法规所造成的制作人、第三方人身财产资源损坏/损害的后果及连带责任负责。
- CC-BY-NC-SA 4.0,知识共享许可协议-署名-非商业使用-相同方式共享。
- CC:知识共享许可协议(英语:Creative Commons license)的缩写。
- BY:署名,您必须给出适当的署名,提供指向本许可协议的链接,同时标明是否(对原始作品)作了修改。
- NC:非商业使用,您不得未经许可将本作品用于商业目的。
- SA:相同方式共享,如果您再混合、转换或者基于本作品进行创作,您必须基于与原先许可协议相同的许可协议分享发布您贡献的作品。
创作不易,请尊重知识产权,维护良好开源环境!
3 MOONPILOT-FC
MOONPILOT-FC模拟图如图2所示:
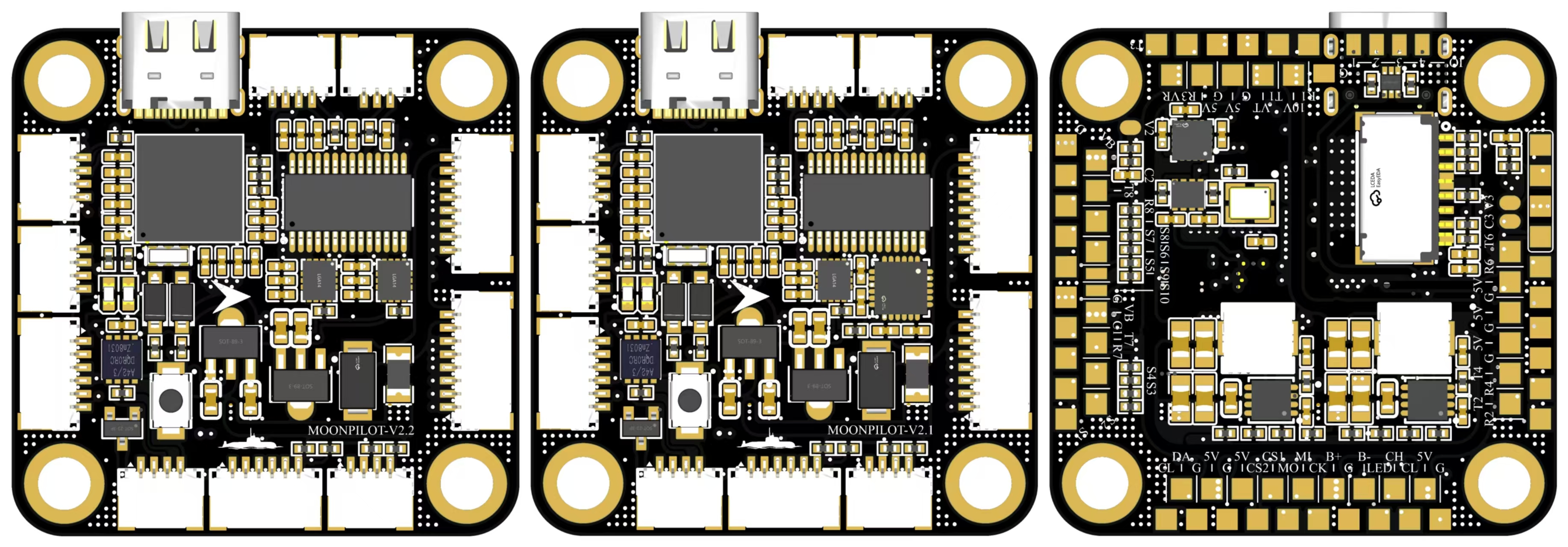 图2 MoonPilot-FC 仿真图
图2 MoonPilot-FC 仿真图
3.1 飞控简介
MOONPILOT 飞控是一款基于 STM32H743 的飞控硬件,支持主流飞控系统(BF/INAV/ARDUPILOT/PX4/FMT等)。其特点如下:
- 使用 STM32H743VIH6 单片机,主频可高达480MHz,除BETAFLIGHT外,对部署了RTOS的飞控系统更加友好,也可部署验证您自己的导航/控制算法;
- 正面布局10个SH1.0插口和1个USB接口,满足了穿越机起飞的基本需求,使用者无须具备一定的焊接技能即可将飞机放飞,额外设计了SWD端口,满足调试需求;
- 双LDO供电设计,MCU供电与SENSORS供电分离,为各传感器提供更加纯净的电源输入;
- 两种PCB设计,不同的IMU组合,ICM42688P × 2(V2.2) 或者 ICM42688P + ICM20689(V2.1);
- 传感器配置丰富(IMU × 2 + 气压计× 1 + 磁力计× 1);
- 配备USB防反击电路、TVS二极管、自恢复保险丝,增加飞控使用安全性;
- 双BEC(5V-2A,10V-1.5A);
- 最小0402封装,降低复刻和维修难度;
- 硬件缩短模拟摄像头输入线路和AT7456E模拟输出线路,尽可能保证模拟信号质量。
3.2 功能
- IMU × 2(ICM42688P × 2 or ICM42688P × 1 + ICM20689 × 1);
- BARO × 1(DPS310 or SPL06);
- MAG × 1(IST8310);
- SD卡 × 1;
- UART × 7(UART1/2/3/4/6/7/8);
- PWM/DSHOT × 10(1-8有接插件,9-10仅焊盘);
- CAN × 1;
- SPI × 1(带2个CS引脚);
- I2C × 1;
- LED × 1;
- BEEPER × 1;
- PIN_IO × 4;
- SWD-DEBUG × 1;
- CAM × 1;
- OSD × 1;
- ADC × 5(10k:1k × 1,20k:1k × 1,10k:10k × 1,1:1 × 2);
- BEC 5V-2A,10V(实际输出10.4V)-1.5A;
3.3 连接
正面接插件如图3所示(以MoonPilot-FC V2.1为例):
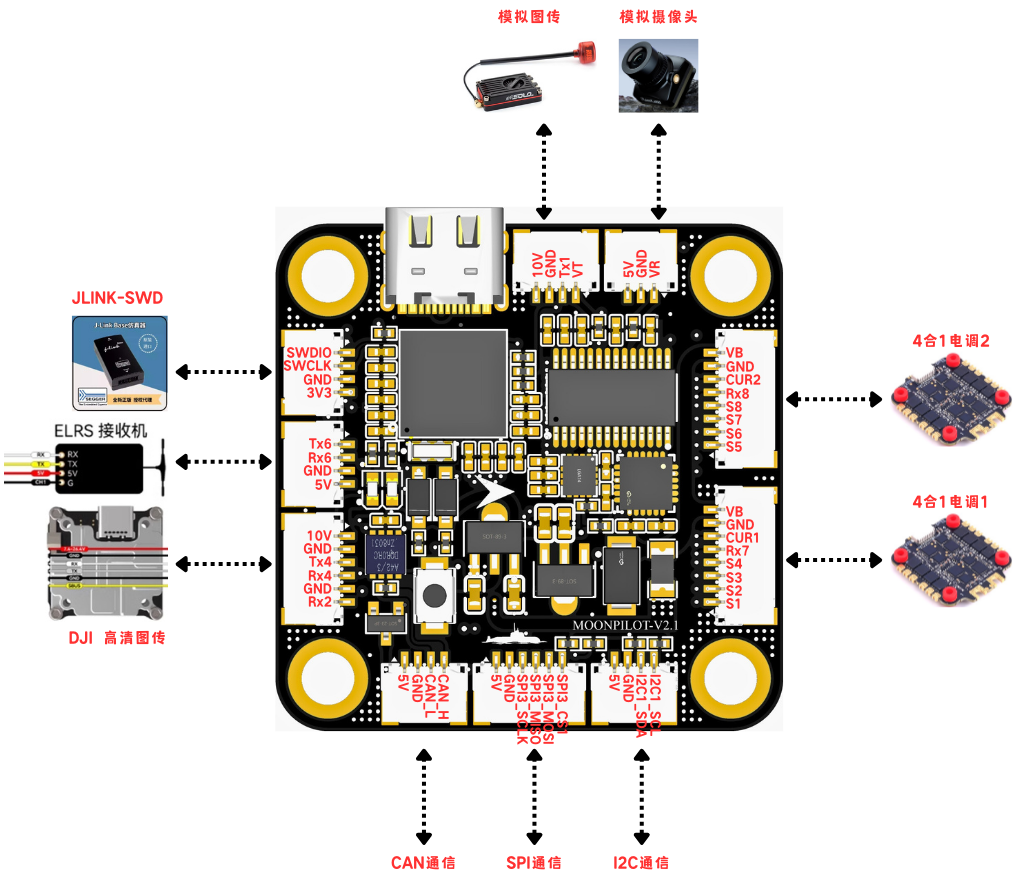 图3 MoonPilot-FC 连接图
图3 MoonPilot-FC 连接图
背面焊盘作者已在PCB底层丝印标记。
3.4 飞控外壳
为飞控设计了F450等机架使用的减震外壳,适用于PX4、ArduPilot等固件:
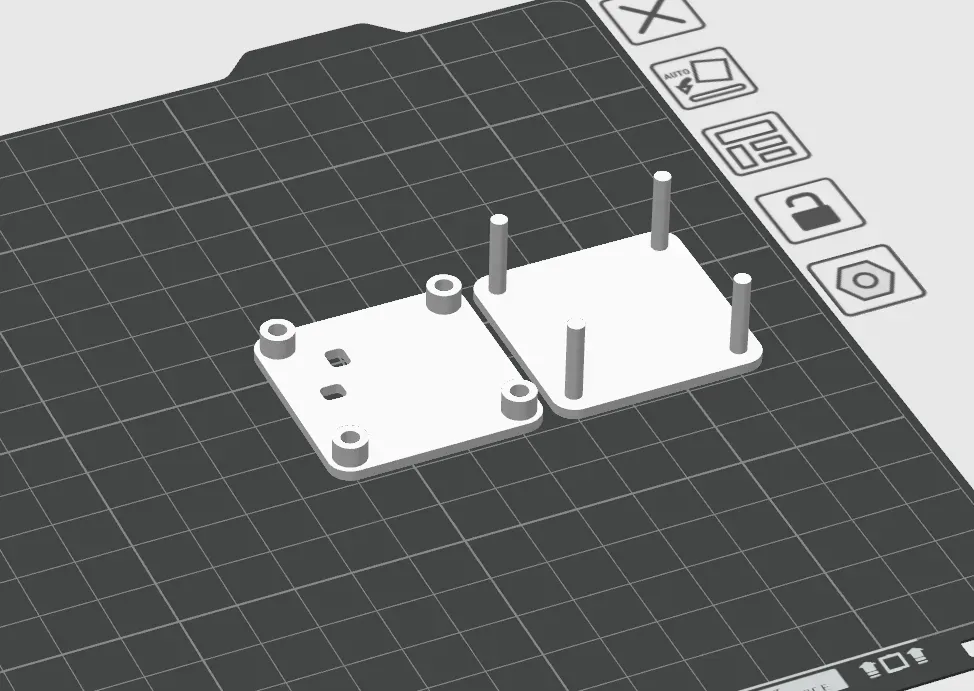 图4 MoonPilot 3D打印外壳
图4 MoonPilot 3D打印外壳
4 MOONPILOT-ESC
MOONPILOT-ESC模拟图如图4所示:
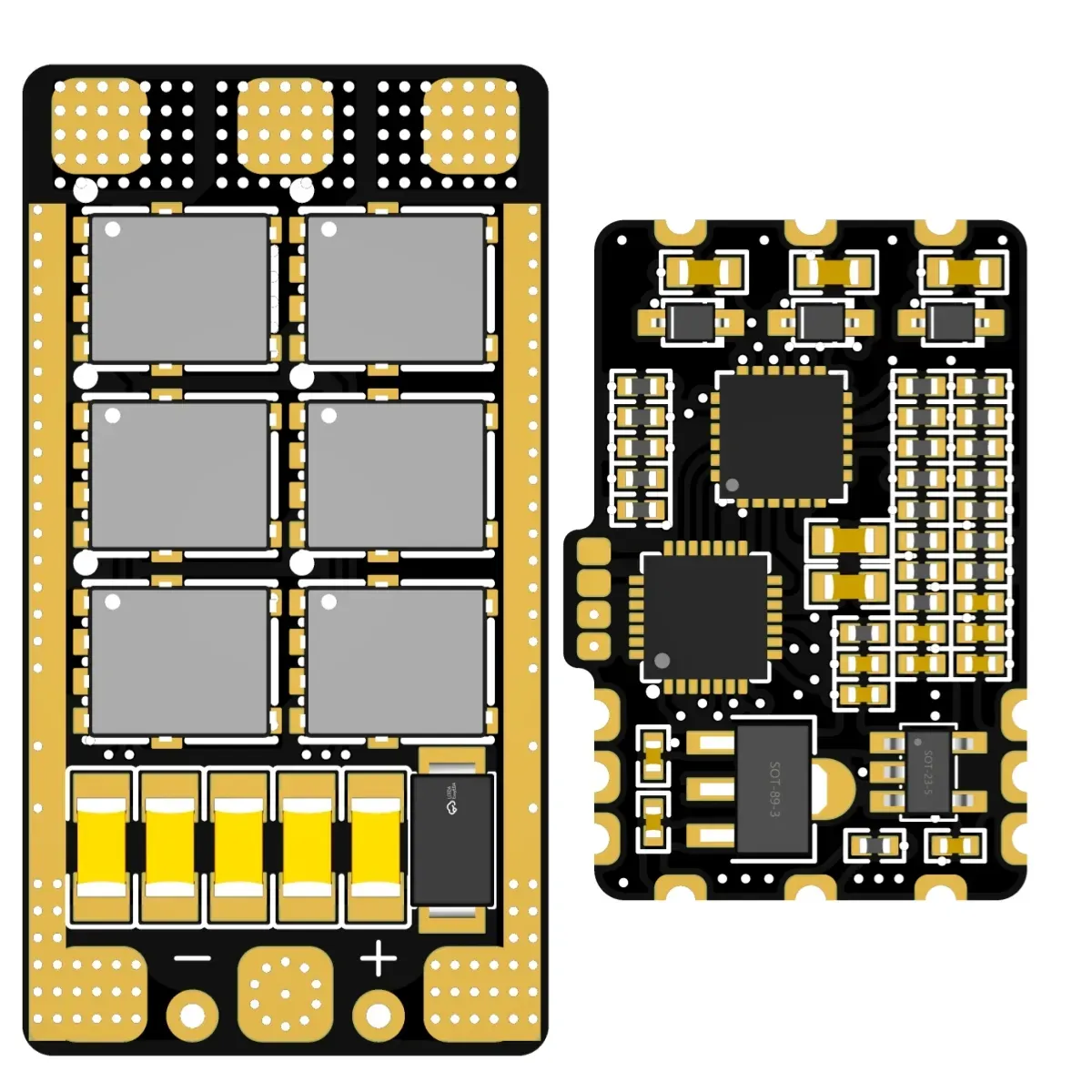 图5 MoonPilot-ESC-DT-V1.1 仿真图(正面过流板&背面控制板)
图5 MoonPilot-ESC-DT-V1.1 仿真图(正面过流板&背面控制板)
4.1 电调简介
- MoonPilot-ESC-DT(V1.1) AM32单体电调使用正面两侧铜条过流(可使用1×1mm方形截面铜条),使得该PCB使用默认的免费打样设置即可承受较大电流;
- 本电调使用了 NTMFS5C430NLT1G onsemi(安森美) N沟道MOS管,连续漏极电流可达200A(40V 1.4mΩ);
- 整体设计布局紧凑,外形尺寸为32mm×17mm;
- 考虑到单体电调需要外置于机臂碳板上,作者额外设计了3D打印外壳,配备散热开窗和扎带定位口设计。
4.2 选型设计
- 本电调设计的原理图适用于使用如下宏定义的硬件(如图5所示):
#define HARDWARE_GROUP_AT_045
#define HARDWARE_GROUP_AT_C
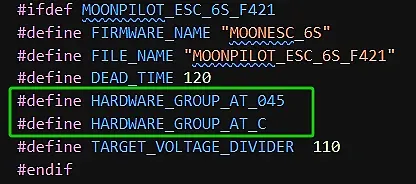 图6 target.h
图6 target.h
该原理图支持的AM32开源固件BootLoader已经上传至附件。
4.3 电调外壳
为电调设计了独立外壳(已上传为附件):
 图7 电调外壳
图7 电调外壳
5 试验进度
- ---2024.08.05-----------------------------------------------------------------------------------
静态测试接插件下电调、图传、OSD、摄像头、遥控接收、电调输出,通信均正常; - ---2024.09.02-----------------------------------------------------------------------------------
静态测试BEEPER、LED灯带,输出正常;
---2024.09.20-----------------------------------------------------------------------------------
静态测试SD卡黑匣子功能正常,在全速记录模式下,姿态解算,姿态控制、OSD等均输出正常无、卡滞; - ---2024.11.10-----------------------------------------------------------------------------------
动态试飞,机架ALong X1 ,800mW熊猫图传,elrs 2.4g 接收机。开启黑匣子记录,可变PWM,能拉满的配置全部拉满,OSD姿态显示丝滑流畅; - ---2024.12.15-----------------------------------------------------------------------------------
动态试飞,MoonPilot H743(V1.6) + AM32 单体电调(V1.2) 套装。
6 更新日志
- ---2024.11.29-----------------------------------------------------------------------------------
MOONPILOT-V1.6:
分离 DJI O3 直插接口的 SBUS 输入接口,更改为 UART2;
优化正面供电模块布局;
优化所有供电线路,增加宽度;
优化PCB制造能力。
MOONPILOT_ESC-V1.1:
增加调试焊盘面积。 - ---2024.12.04-----------------------------------------------------------------------------------
MOONPILOT_ESC-V1.2:
更换自举二极管型号;
优化布局,优化PCB制造能力。 - ---2025.03.01-----------------------------------------------------------------------------------
MOONPILOT-V2.1&V2.2:
替换了IMU-MPU6000,换装 ICM42688P × 2(V2.2) 或者 ICM42688P + ICM20689(V2.1);
优化PCB设计,增加动力线宽度,大幅度改换圆弧布线方式;
全飞控最小原件更改为0402封装,降低复刻难度;
新增磁力计(IST8310)。
MOONPILOT_ESC-V1.6:
缩小PCB尺寸(30mm × 16mm);
增加加速电容设计,减少MOS管发热;
删除半孔工艺设计,降低复刻成本。 - ---2025.05.17-----------------------------------------------------------------------------------
MOONPILOT-V2.1&V2.2:
更新了PX4、ArduPilot固件(已试飞)。
MOONPILOT_ESC-DT-V1.1:
更换了单体电调设计(已静态测试),原V1.6版本电调已下架。 - ---本项目持续更新中----------------------------------------------------------------------------
7 试飞视频
MoonPilot H743 试飞记录,不包括单体电调 2024.11.10 (B站视频跳转)
MoonPilot H743 + AM32 单体电调 套装 试飞记录 2024.12.15 (B站视频跳转)
MoonPilot-ESC-DT V1.1 极限无风无散热最大过流测试 表面1oz 内层0.5oz 2025.05.15 (B站视频跳转)
MoonPilot-ESC-DT V1.1 全面测试(B站视频跳转)
8 关于打样和焊接
最近已经有朋友们复刻了本电路设计,在这里谈几点焊接注意事项:
- FC硬件在正反面都设计了元器件,背面设计的气压计DPS310对焊接温度较为敏感,背面推荐使用低温锡焊接,背面风枪温度不要超过250℃(或可以使用气压计SPL06替换),正面可以使用中温锡或高温锡;
- 尽量先完成供电电路的焊接,测试输出正常后再焊接传感器和主控芯片,预防意外发生;
- ESC最好使用表面2OZ,如果使用免费的1OZ那么最好少拉满油门,75%油门可以拉个十几秒(无散热);
- 如果您打样成功,请私信作者本人,后续计划收集打样成功的示例,拼图后展示在该帖最后。
9 网友复刻
锻炼自己的动手能力,您也可以实现飞控自由!~
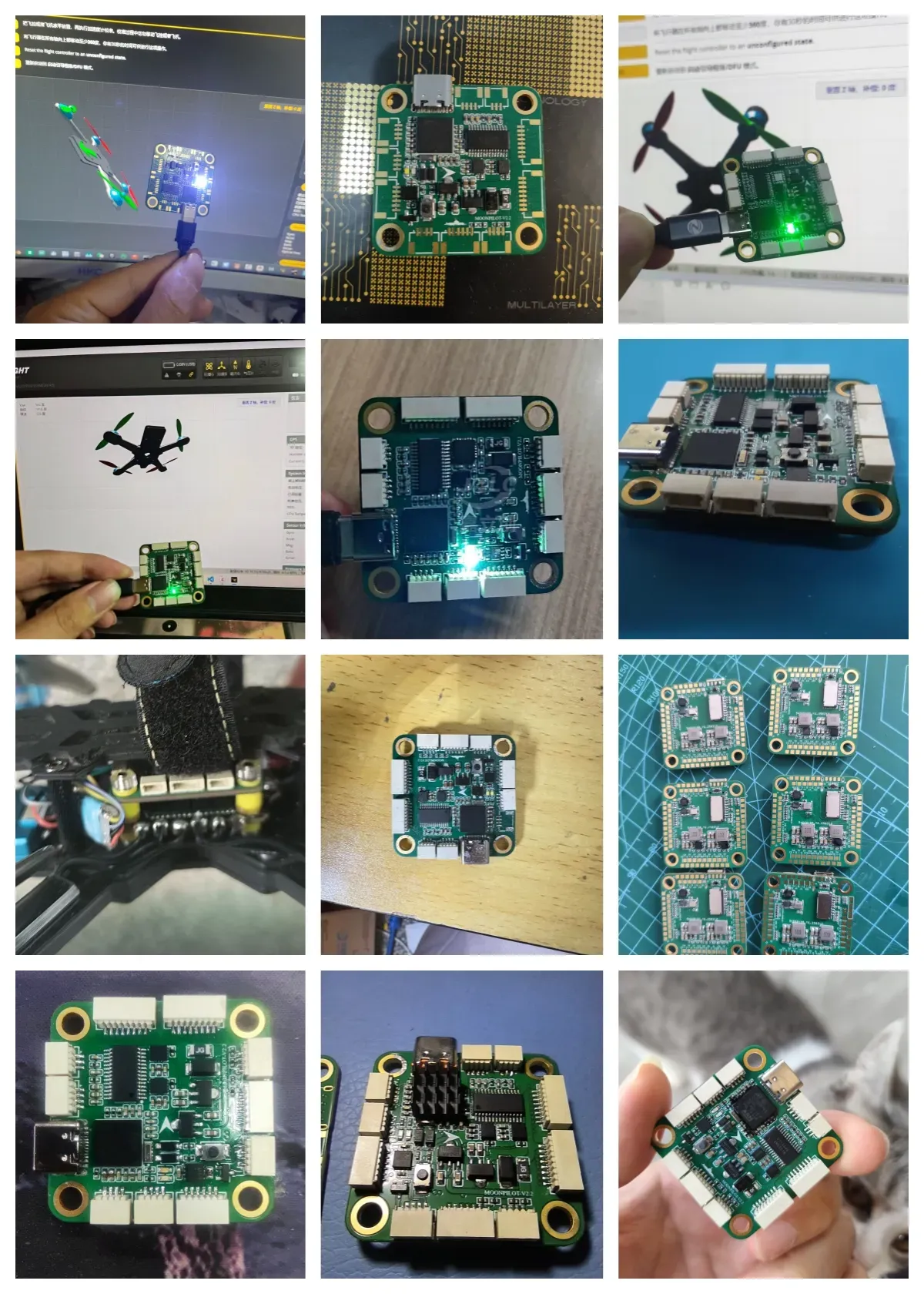 图8 复刻拼图
图8 复刻拼图
5寸机全套装机实拍:
 图9 装机实拍
图9 装机实拍
本项目已参加【星火计划】项目,恳请各位飞友点赞、收藏!!
鉴于广大飞友对电调项目的需求,本人已拼版制造了少量电调顶板。该板采用嘉立创工艺,4面半孔、底板外2oz/内1oz、顶板外1oz/内1oz。小黄鱼搜索用户“月饼飞控铺子”。
设计图
BOM
 克隆工程
克隆工程 暂无相关工程
暂无相关工程
评论