



标准版
【训练营】会摇尾巴的小狗
1.1k
0
0
0
简介
炒鸡可爱的修狗哇!!!
简介:炒鸡可爱的修狗哇!!!开源协议
:GPL 3.0
创建时间:2022-06-25 13:31:26更新时间:2022-07-18 13:26:05
描述
简介:鸿蒙仿生小狗,采用Hi3861模组作为主控,控制9路舵机,其中8路是小狗腿的运动,1路控制尾巴的摆动,模块提供锂电池供电与外部供电可供选择。此外,电路带有电流检测、锂电池充放电、蜂鸣器驱动等附带功能。可以实现前进、后退、站立、握手等动作。
PCB硬件总述
电路设计主要思路,以及PCB实物图如下
需要注意的问题:
1. 在第一版电路中PCA9685的供电标签是3.3V而电路中的实际供电是+3,3V,所以从1117飞了一条线给舵机芯片供电。
2.第一版电路中CH340的rx与tx跟芯片的rx和tx搞反了所以飞了两条线。
3.在实际使用电池供电时,容易因为舵机工作时电流不稳定触发IP5306的过流保护,后面会针对这一问题进行进一步的优化,若有大佬相助不胜感激。
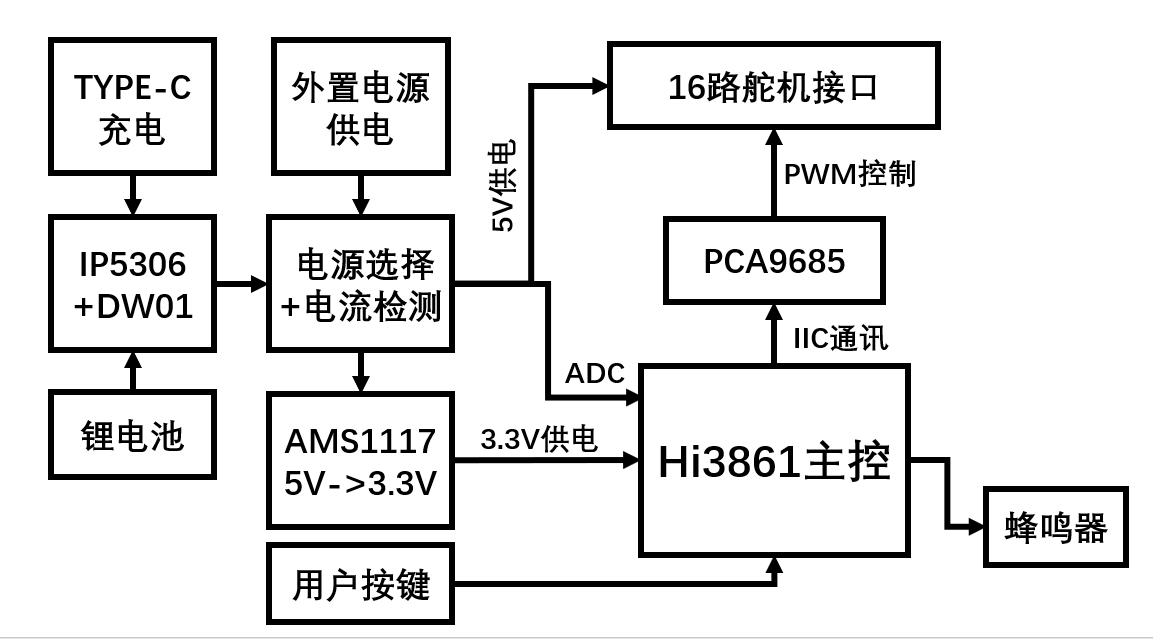

PCB硬件 — 主控部分
传智教育 Hi3861 IoT WiFi 模组是一款基于海思 Hi3861LV100 芯片的系统级封装模组,可提
供完整的 Wi-Fi IoT 开发功能。模块采用3.3v进行供电,通过IIC接口与舵机控制芯片PCA9685进行通讯。PCB所有GPIO口均引出,并添加了3个用户按键。蜂鸣器驱动方便后续功能拓展。
PCA9685是一款基于I2C总线控制的16路LED背光调节控制芯片。每一路LED输出端均可自由调节PWM波的频率 (40-1000Hz) 和占空比 (0%-100%) 。
对于舵机的控制利用Hi3861通过iic与舵机控制芯片PCA9685进行通讯,可以实现16路的舵机控制。





PCB硬件 — 电源部分





在供电方面提供了电池供电与外置电源供电两种方式,通过跳线帽进行选择。
在电池供电中采用IP5306芯片进行充放电管理,并外加了一颗DW01进行电池保护。
IP5306 是一款集成升压转换器、锂电池充电管
理、电池电量指示的多功能电源管理 SOC,为移动
电源提供完整的电源解决方案。IP5306 的高集成度与丰富功能,使其在应用时
仅需极少的外围器件,并有效减小整体方案的尺寸,
降低 BOM 成本。
由于主控工作需要3.3V的电压所以加了AMS1117以提供3.3V的电压。
同时还利用INA199电流采样芯片对整个系统的电流进行检测(由于时间有限还没有针对这一功能写ADC读出的响应程序但是万用表测量INA199的输出正常)




PCB硬件 — 程序烧录
Hi3861带有网络烧录,使用起来十分方便,但是烧录固件以及打印串口信息仍然需要USB转串口芯片。
为了方便固件的烧录,板载的ch340n作为USB转串口通讯,这个芯片无需外部晶振,仅需要极少的阻容便可以实现通讯功能。

软件说明
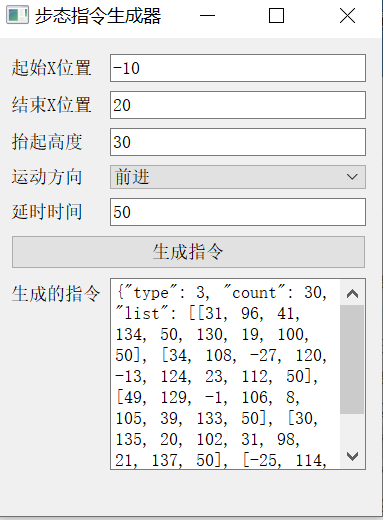
训练营官方提供了程序源码以及机器狗步态生成工具,因此程序编写起来十分容易。
详细可参考B站视频仿生机器狗训练营>固件开发环境_哔哩哔哩_bilibili
在虚拟机环境中只需要修改网页相关json代码便可以实现多种步态以及网页的修改。

实物展示
机械小狗的内部、正面、侧面照



程序的控制网页

相关软件
这个小狗步态生成软件直接生成json格式数据,直接复制过去就可以使用真的非常好用!!!
这个软件可以反解出狗腿的坐标以及舵机角度的关系

HiBurn主要进行固件的烧录

SolidWorks建模
项目利用SolidWorks进行狗外壳的建模,相关文件放到附件中去了,使用的版本是SolidWorks2016.
为了节省打印消耗,整个小狗的内部非常紧凑,整个模型仅有手掌大小
三维猴打印费用 ~60元




BOM
| ID | Name | Designator | Footprint | Quantity |
|---|---|---|---|---|
| 1 | HDR-M-2.54_1x2 | A-TEST1,J7 | HDR-M-2.54_1X2 | 2 |
| 2 | 锂电池 | BAT1 | 锂电池 | 1 |
| 3 | 0.04 | BR1 | R2512 | 1 |
| 4 | SUN-12095-5VPA7.6 | BUZZER1 | BUZ-TH_BD12.0-P7.60-D0.6-FD | 1 |
| 5 | 2.2u | C1,C6 | C0805 | 2 |
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
工程成员
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论