



专业版
TB6612四路电机驱动
1.8k
0
0
0
简介
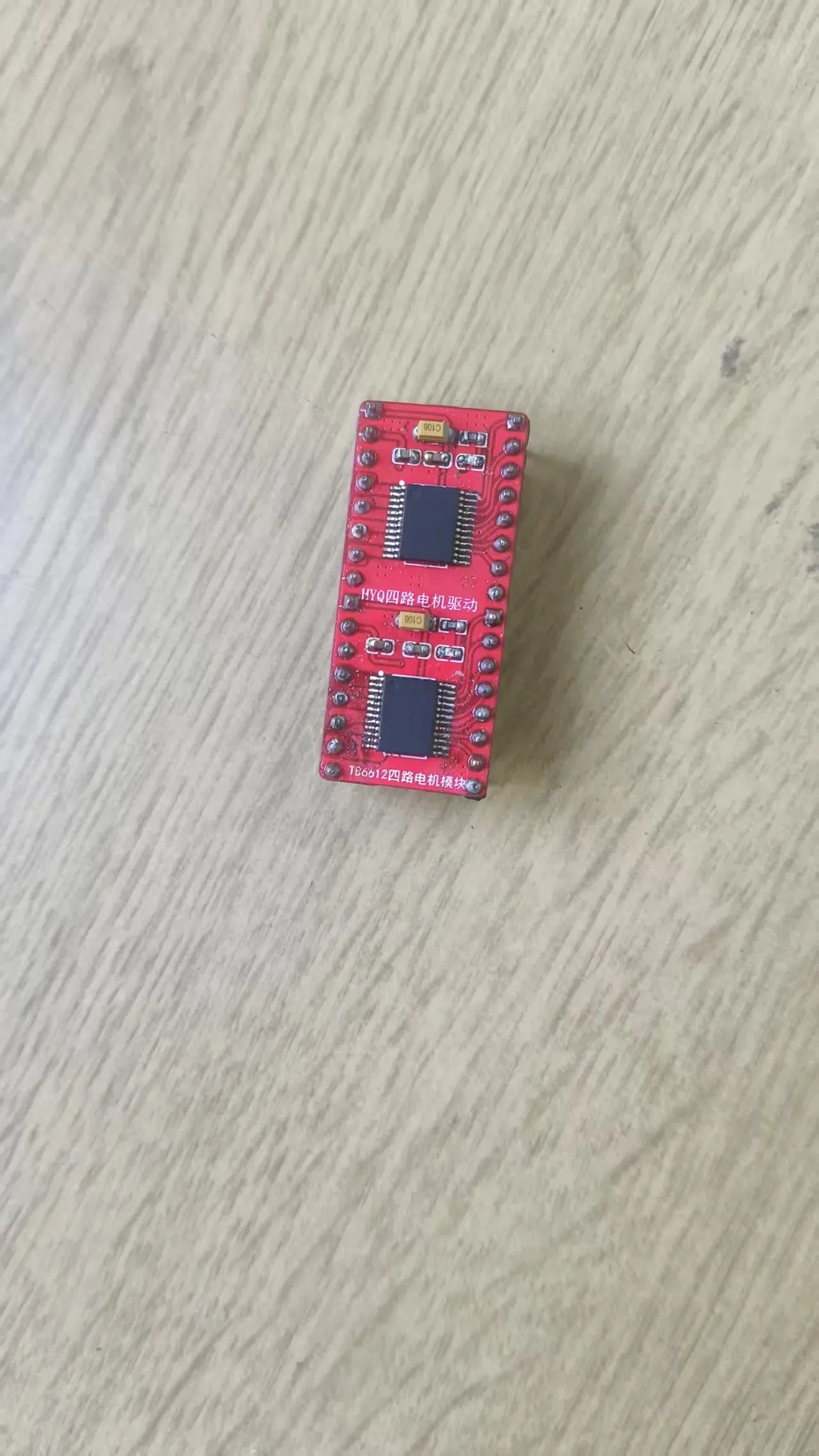
本设计基于两块TB6612FNG电机驱动芯片搭建的四路直流电机驱动方案,支持PWM调速、正反转控制及低功耗待机模式,适用于智能小车、机器人、自动化设备等场景。
简介:本设计基于两块TB6612FNG电机驱动芯片搭建的四路直流电机驱动方案,支持PWM调速、正反转控制及低功耗待机模式,适用于智能小车、机器人、自动化设备等场景。复刻成本:¥20
开源协议
:GPL 3.0
创建时间:2025-04-09 04:59:20更新时间:2025-04-21 02:28:29
描述
一、TB6612核心参数
- 驱动类型:双路H桥直流电机驱动,可独立控制两路电机
- 工作电压:
- VM(电机电源):4.5V-13.5V(推荐≤10V,3节锂电池需谨慎)
- VCC(逻辑电源):2.7V-5.5V(兼容3.3V/5V MCU)
- VM(电机电源):4.5V-13.5V(推荐≤10V,3节锂电池需谨慎)
- 输出能力:
- 持续电流:1.2A/路
- 峰值电流:3.2A/路(持续≤2秒)
控制信号:支持PWM调速(最高100kHz)和方向控制
二、引脚功能与控制逻辑
1. 关键引脚说明(以单路电机为例):
引脚名称 功能描述 连接建议 AIN1/AIN2 方向控制(高/低电平组合) 接MCU的GPIO PWMA PWM调速输入(占空比控制转速) 接MCU的PWM引脚(如TIM通道) AO1/AO2 电机输出端 接电机正负极 STBY 待机控制(高电平工作,低电平停转) 接MCU GPIO或直接接VCC VM 电机电源输入 外接5-10V电源(需滤波电容) VCC 逻辑电源 接MCU的3.3V/5V BIN1/BIN2 方向控制(高/低电平组合) 接MCU的GPIO PWMB PWM调速输入(占空比控制转速) 接MCU的PWM引脚(如TIM通道) BO1/BO2 电机输出端 接电机正负极 CIN1/CIN2 方向控制(高/低电平组合) 接MCU的GPIO PWMC PWM调速输入(占空比控制转速) 接MCU的PWM引脚(如TIM通道) CO1/CO2 电机输出端 接电机正负极 DIN1/DIN2 方向控制(高/低电平组合) 接MCU的GPIO PWMD PWM调速输入(占空比控制转速) 接MCU的PWM引脚(如TIM通道) DO1/DO2 电机输出端 接电机正负极 2. 方向控制真值表:
XIN1 XIN2 电机状态 0 0 停止 1 0 正转 0 1 反转 1 1 刹车停转(慎用)
实物图
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
工程成员
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论