



智能小车
简介
本人做的第一款智能小车拥有循迹,遥控,避障,oled显示,前车灯以及左右车灯等功能,因为经验欠缺,能力有限,在加上6月底期末考试在实物设计部分出现太多问题,好在最后完成小车设计
简介:本人做的第一款智能小车拥有循迹,遥控,避障,oled显示,前车灯以及左右车灯等功能,因为经验欠缺,能力有限,在加上6月底期末考试在实物设计部分出现太多问题,好在最后完成小车设计开源协议
:GPL 3.0
描述
功能介绍:
基于立创梁山派的智能小车,整体设计是采用2块 10cm * 10cm PCB设计,主要的功能包含循迹、避障、蓝牙遥控,oled显示等,其整体组成组成如下图:

选型说明:
1.电机驱动:
- VM电机电压:<12V
- VCC芯片电压:2.7~5.5V
- 输出电流:1A
- 控制方式:PWM
介绍:TB6612FNG是一款新型驱动器件,能独立双向控制2个直流电机,它具有很高的集成度,同时能提供足够的输出能力,运行性能和能耗方面也具有优势因此在集成化、小型化的电机控制系统中,它可以作为理想的电机驱动器件


2.超声波模块 HC-SR04:
- 工作电压:3-5.5V
- 工作电流:5.3MA
- 感应角度:小于15度
- 探测距离:2CM-600CM
- 探测精度:0.1CM+1%
- 输出方式: GPIO
- 管脚数量:4 Pin

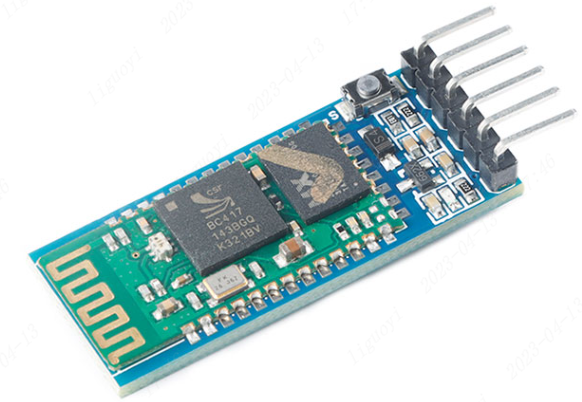
3.HC05蓝牙模块
- 工作电压:3.6-6V
- 供电电流:40mA
- 发射功率:4dBm(最大)
- 参考距离:10米
- 控制方式:串口
- 管脚数量:6 Pin(2.54mm间距排针)

4.0.96寸IIC单色屏
- 工作电压:3.3V
- 工作电流:9MA
- 模块尺寸:27.3 x 27.8 MM
- 像素大小:128(H) x 64(V)RGB
- 驱动芯片:SSD1306
- 通信协议:IIC
- 管脚数量:4 Pin(2.54mm间距排针)

碰到的问题与解决方法:
问题一:oled的引脚和超声波引脚位置放反造成不能直接插在排母上
解决方法:直接利用杜邦线和跳线将第一层的引脚飞线到第二层,显示器和超声波固定在最上层板子上

问题二:设计原理图是不小心把TB6612FNG的PWMA引脚设计在PB3引脚
解决方法:直接把两处引脚焊接到一起

问题三:电池忘记在学校,电源部分用黑胶带固定外观难看
解决方法:直接用充电宝连上daplink给开发板供电,在最上层用双面胶固定充电宝


原理图设计部分
因为自己是新手本来打算完全按照视频教程来,但是觉得可以按照自己的想法来做,所以做出了原理图二,毕竟自己设计的话收获更大。
1.电机驱动部分,使用对应的符号和封装

2.车灯不分的话使用的是3mm的led灯,从使用效果来看,前车灯可以换成5mm的led灯效果会更好

3.剩余部分的话都是用的模块,如蜂鸣器模块,配合对应的排母引脚可以做到可拆卸重复利用,可玩性更高



PCB设计部分
1、小车PCB部分
使用的是 10cm * 10cm设计,配合3个M3的螺孔和铜柱可以将小车设计成2层结构

2、循迹PCB部分
这里是将循迹部分单独画一块PCB板,配合M3螺母和铜柱可以做到固定作用,从最终使用情况来看,不建议将这一部分放在小车底层,可能是因为光线的原因,导致循迹部分无法检测到黑线,解决方法的话,可以在pcb上加上2-3个led白灯,可以保证循迹部分不会受到光线的影响

蓝牙app
蓝牙app的话在网站 http://app.gzjkw.net/login/ 上制作,可以加上自己喜欢的图片当做背景

程序部分
可以下载附件,我在代码上加了注释,在这里的话不太方便讲
实物展示:



设计图
BOM
 克隆工程
克隆工程工程成员
 暂无相关工程
暂无相关工程
评论