



专业版
【训练营】ZDOG
925
0
0
0
简介
基于开源鸿蒙 OpenHarmony 系统的8自由度并联腿部四足机器狗,使用Hi3861 IoT WiFi 模组开发,实现了walk步态和trot步态
简介:基于开源鸿蒙 OpenHarmony 系统的8自由度并联腿部四足机器狗,使用Hi3861 IoT WiFi 模组开发,实现了walk步态和trot步态开源协议
:GPL 3.0
创建时间:2022-06-21 16:09:08更新时间:2022-07-25 08:12:54
描述
1.工程介绍
基于开源鸿蒙 OpenHarmony 系统的8自由度并联腿部四足机器狗
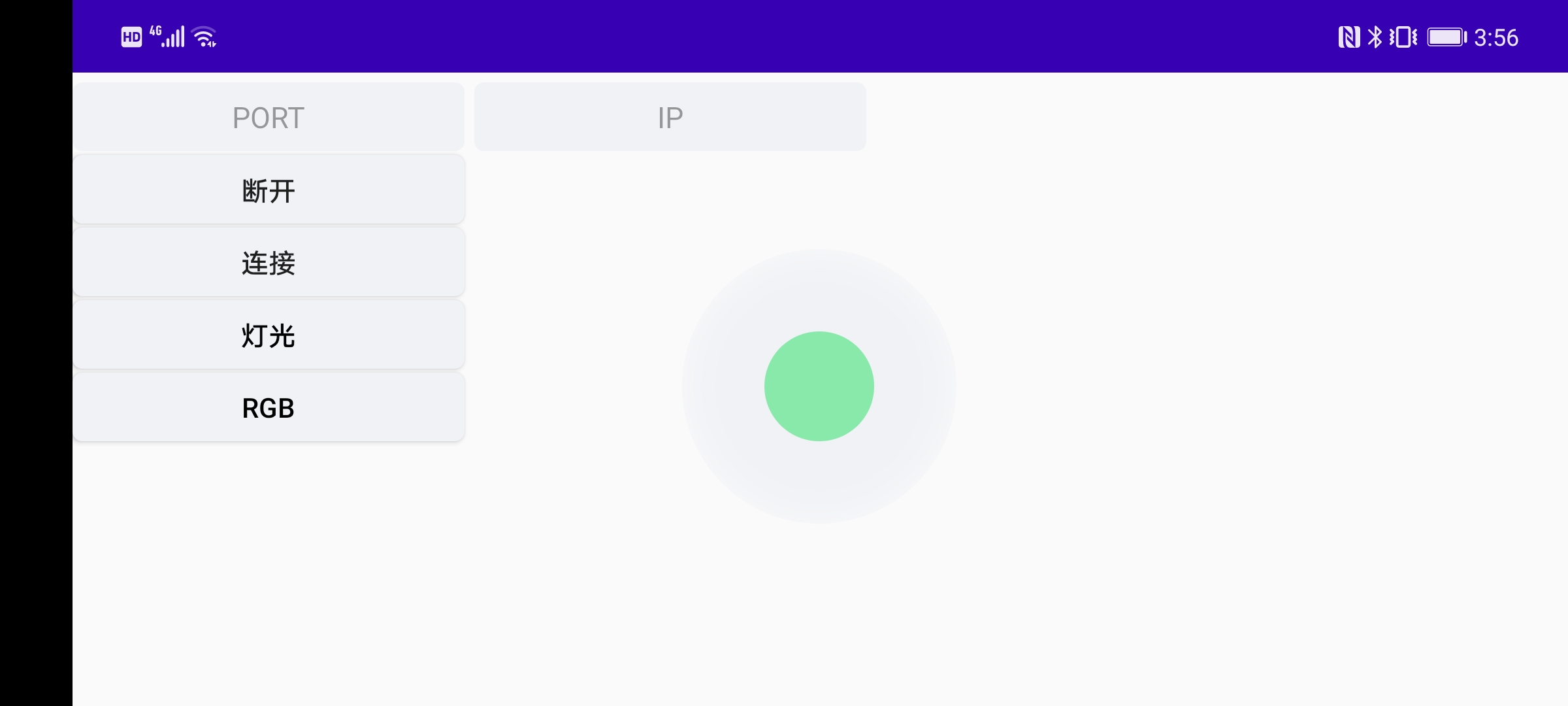
使用Hi3861 IoT WiFi 模组开发,实现了walk步态和trot步态,开发了Android平台的APP实现了Socket(UDP)通讯

2.硬件介绍
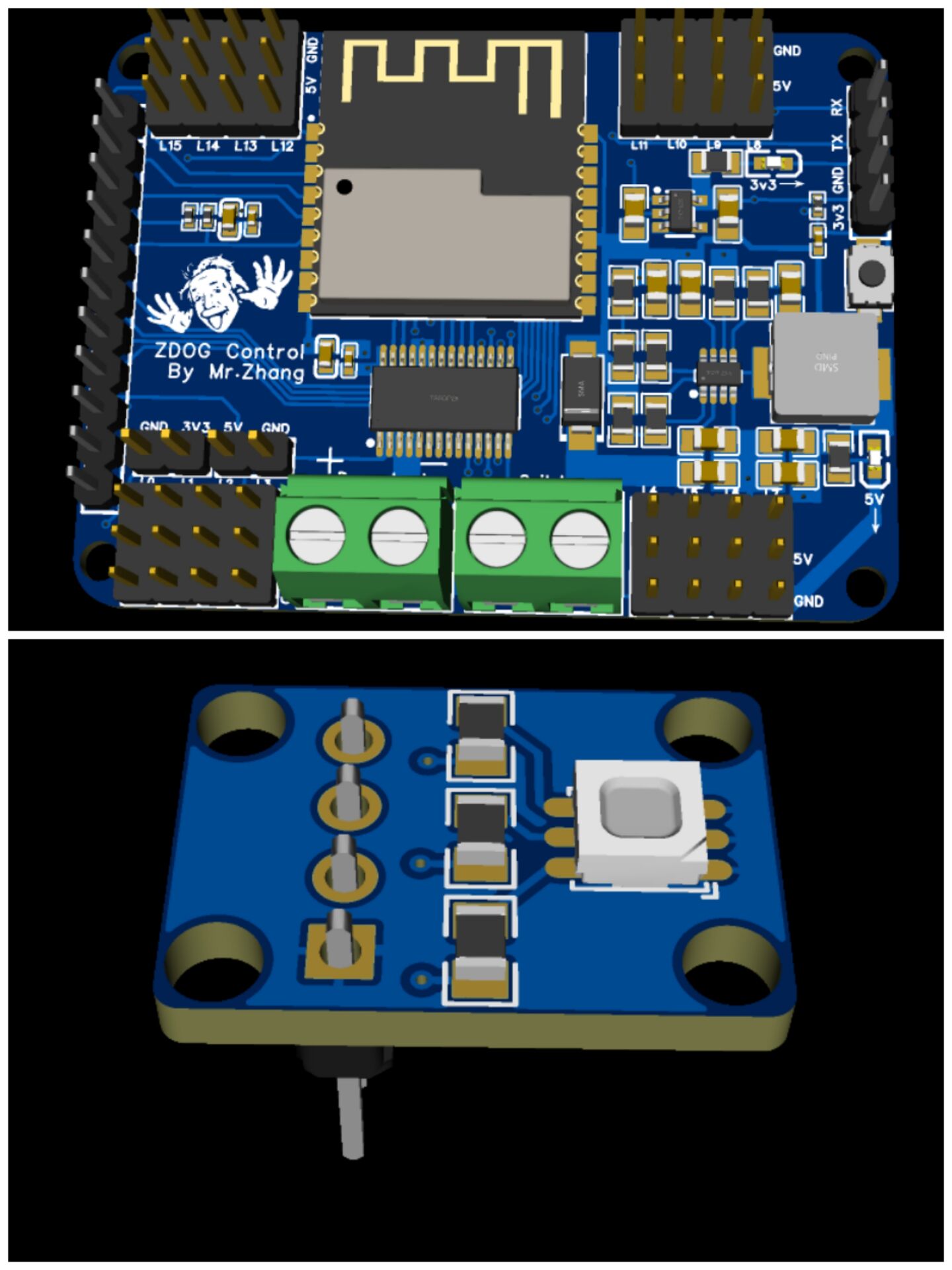
2.1电路设计
- 主控选用了Hi3861,主频最高可达160M,作为一款wifi模组,有丰富的外设接口可供开发,同时可以使用多线程编程。
- 电源部分设计了12v转5V的DC-DC电路,使用MP2315芯片,最大支撑3A的负载电流。
- 舵机控制芯片使用了PCA9685PW,基于IIC总线通信的12bit精度,16通道的PWM波输出,最高支持16路舵机的管理。
- 设计了一款RGB电路,用于灯光控制
2.2机械结构设计
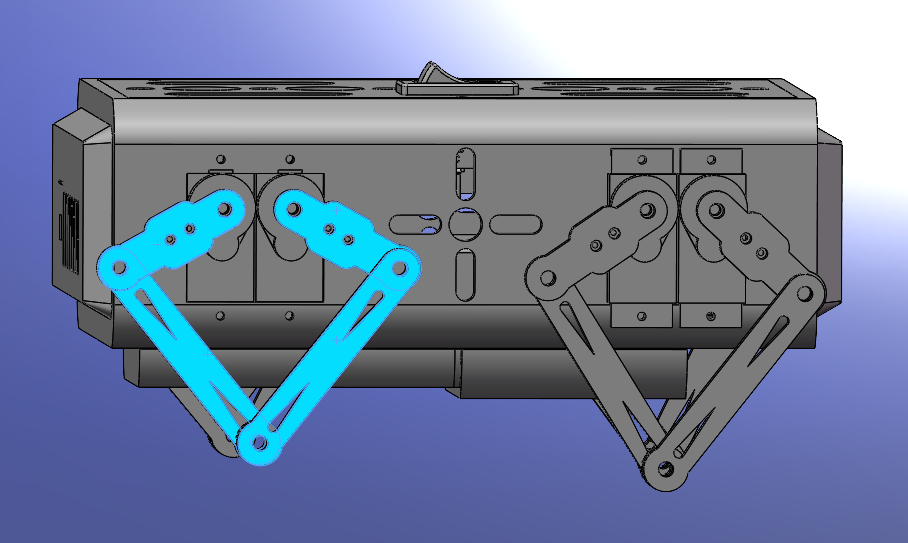
2.2.1腿部设计
狗的腿部使用两个舵机进行并联连接,每个腿部末端可以在它所在的平面内自由移动,故每个腿具有2自由度,整体具有8个自由度。
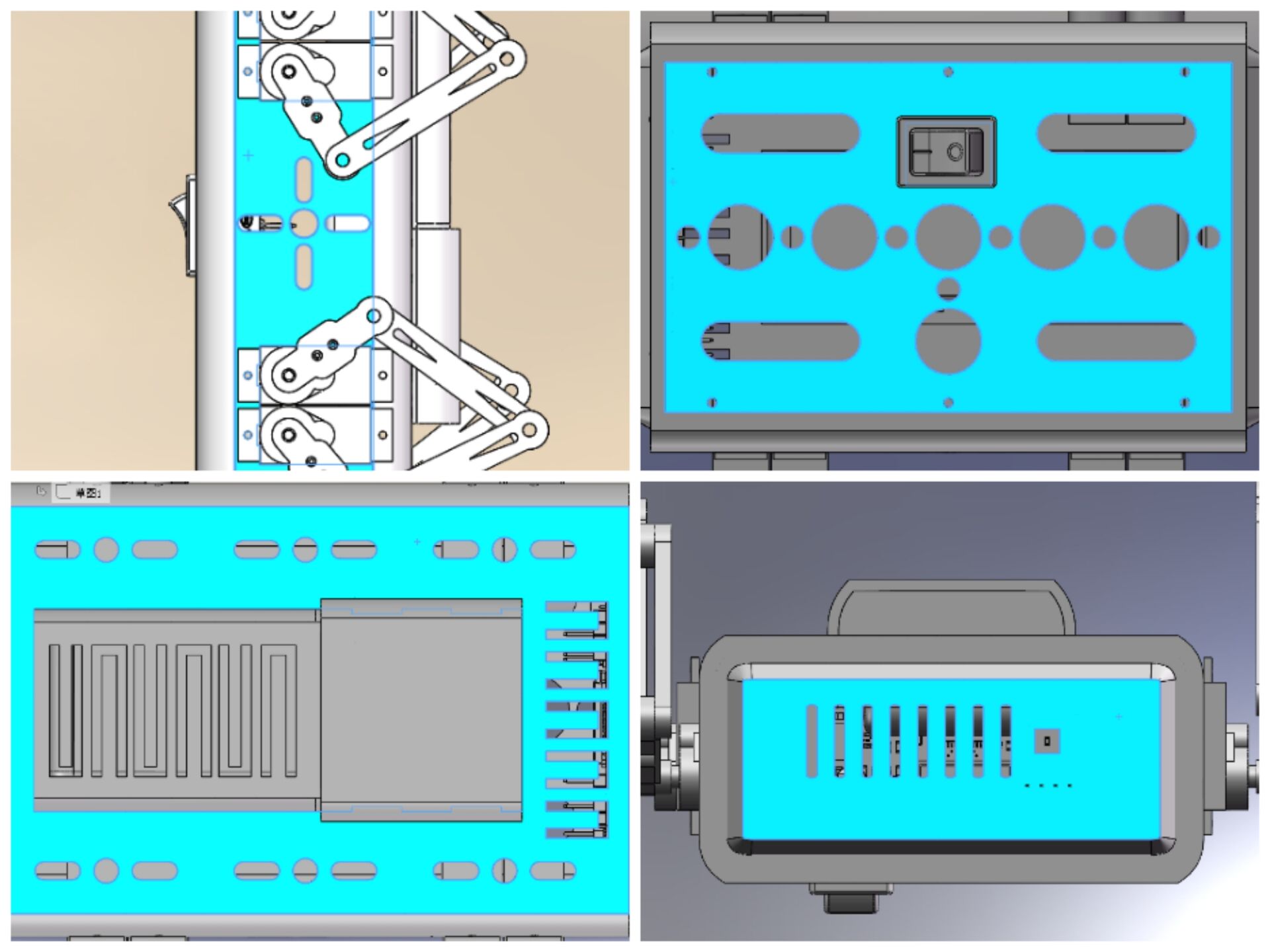
2.2.2减重设计
为了减轻重量,在设计中加入了许多的纹路,同时具有美化的效果。
2.3创新部分
改进了狗的腿部结构(使用对称设计),重新推到并且简化了逆解运动学的算法;加入了灯光控制电路,通过控制Hi3861的IO口实现RGB闪烁。
逆解运动学公式重新推导
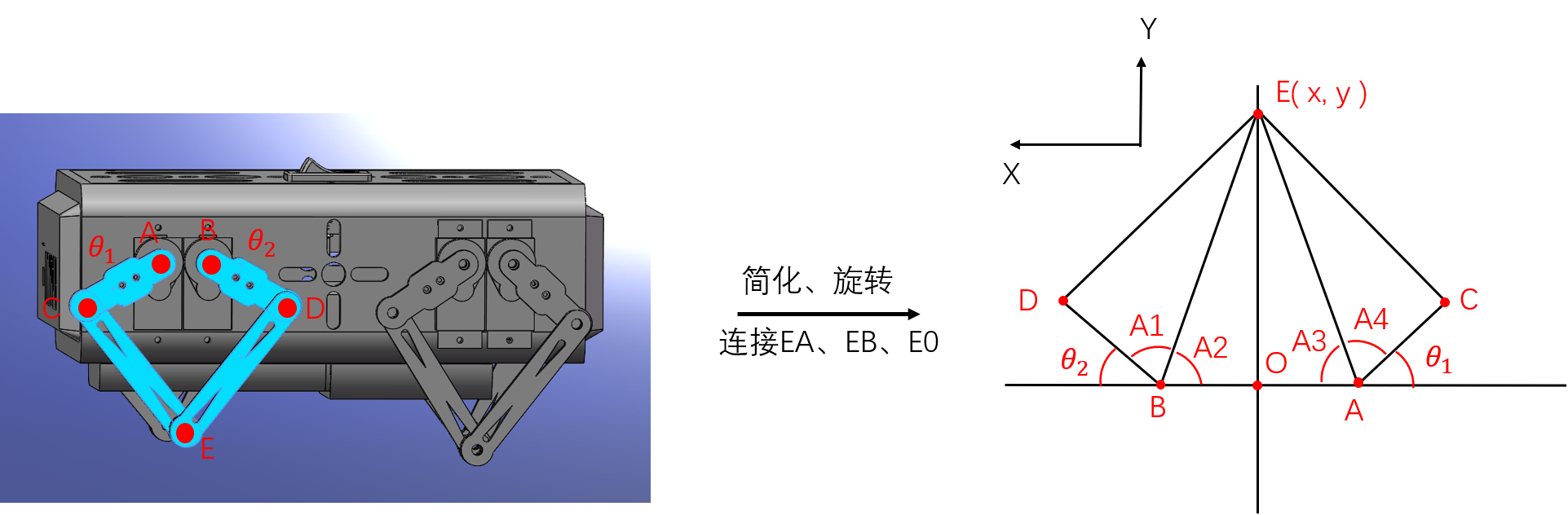
逆解运动学就是已知末端坐标E(x,y)求解两个舵机的转角cita1、cita2,由于设计我们已知AC=BD、CD=DE、0A=0B,我们连接EB、OE、AE
在图中特殊位置三角形EB0、E0A均为直角三角形,故根据勾股定理可以求出BE等于(0B^2+BE^2)^1/2,同理求出AE
在三角形DBE中我们已知DB、DE、BE,根据余弦定理可以角A1=acos((DB^2+BE^2-DE^2)/(2*DB*BE)),同时我们可以根据余下的三角形求出角A2、A3、A4
最终我们得到舵机的扭角cita2=180-A1-A2 cita1=180-A3-A4 (角度值)
以上便是逆解运动学公式的推导,我们便可以将上述算法转换为程序,根据末端坐标值求出舵机的转角进而控制舵机运动
3.软件部分
3.1机械狗软件框架
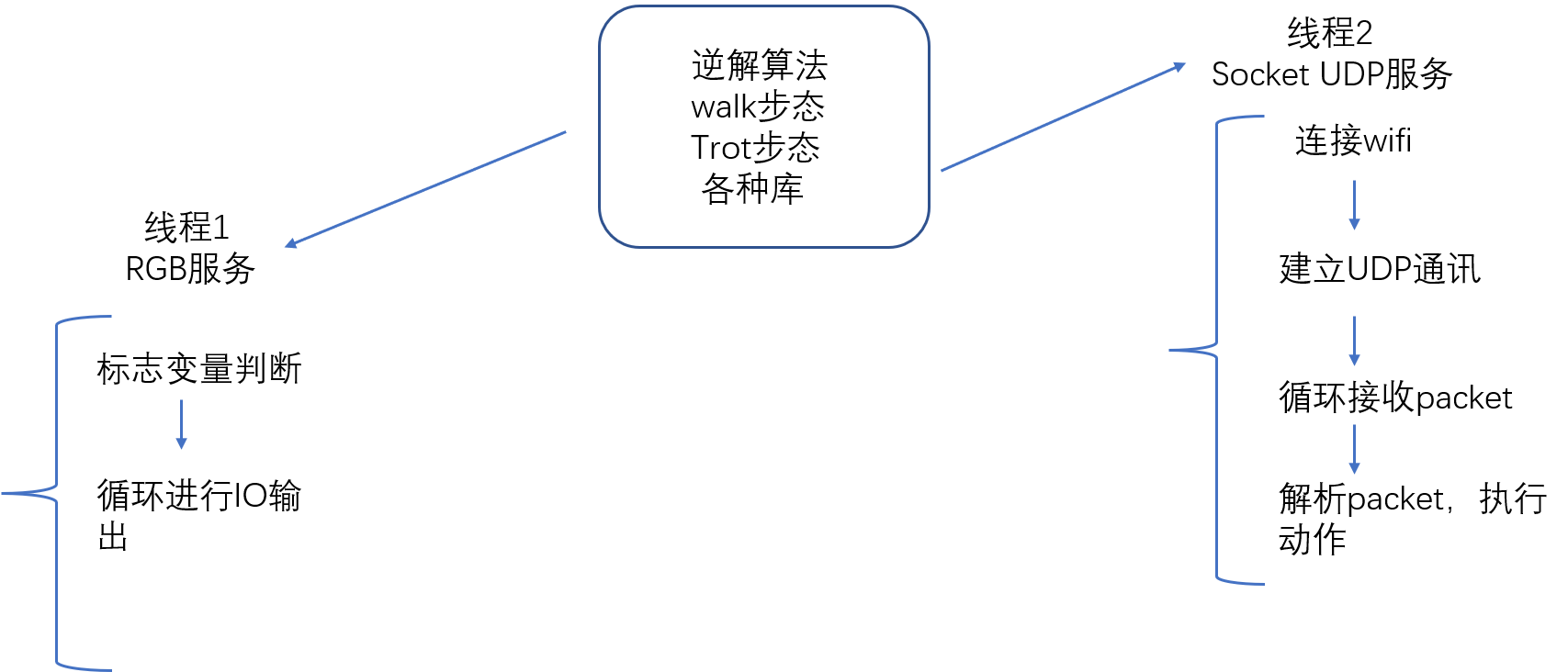
3.2步态算法
3.2.1 walk步态
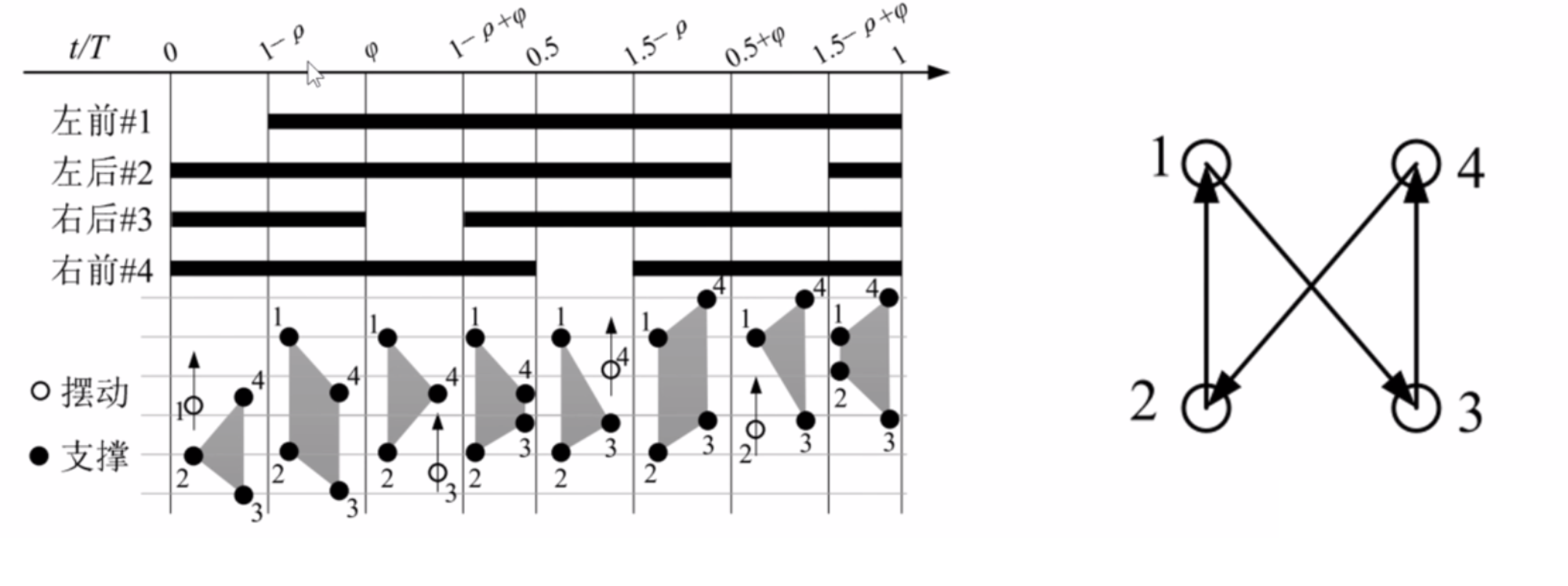
在walk步态中,每1/4个周期有1个腿处于摆动态,3个腿处于支撑态,同时腿摆动的前后顺序式1-3-4-2
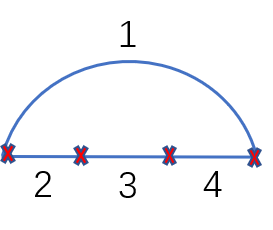
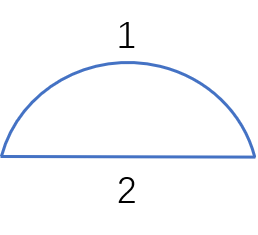
机械狗在运动过程中每条腿的末端轨迹均是摆线和直线的封闭图形,如上所示
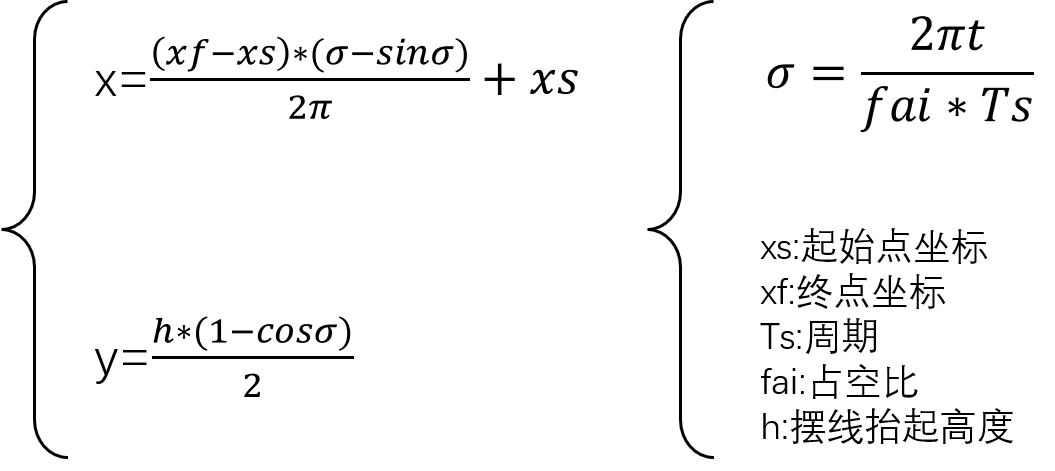
由上图我们我们知道了摆线方程的坐标表示式,在程序设计中我们通过以t为变量自增的方式得到这段坐标
然后我们将摆线分成四部分
机械狗的walk步态中每1/4的周期中有一条腿处于摆动,3条腿处于支撑,所以在第一个1/4周期内腿1由xs经1运动到xf,腿2由xf经2运动到下一位置,同时腿3进行2运动,腿4进行3运动
第二个1/4周期内腿1进行运动2,腿2进行运动3,腿3进行运动1,腿4进行运动4
第三个1/4周期内腿1进行运动3,腿2进行运动4,腿3进行运动1,腿4进行运动2
最后一个1/4周期内腿1进行运动4,腿2进行运动1,腿3进行运动2,腿4进行运动3
循环上一过程,我们便得到了walk步态。
3.2.2 trot步态
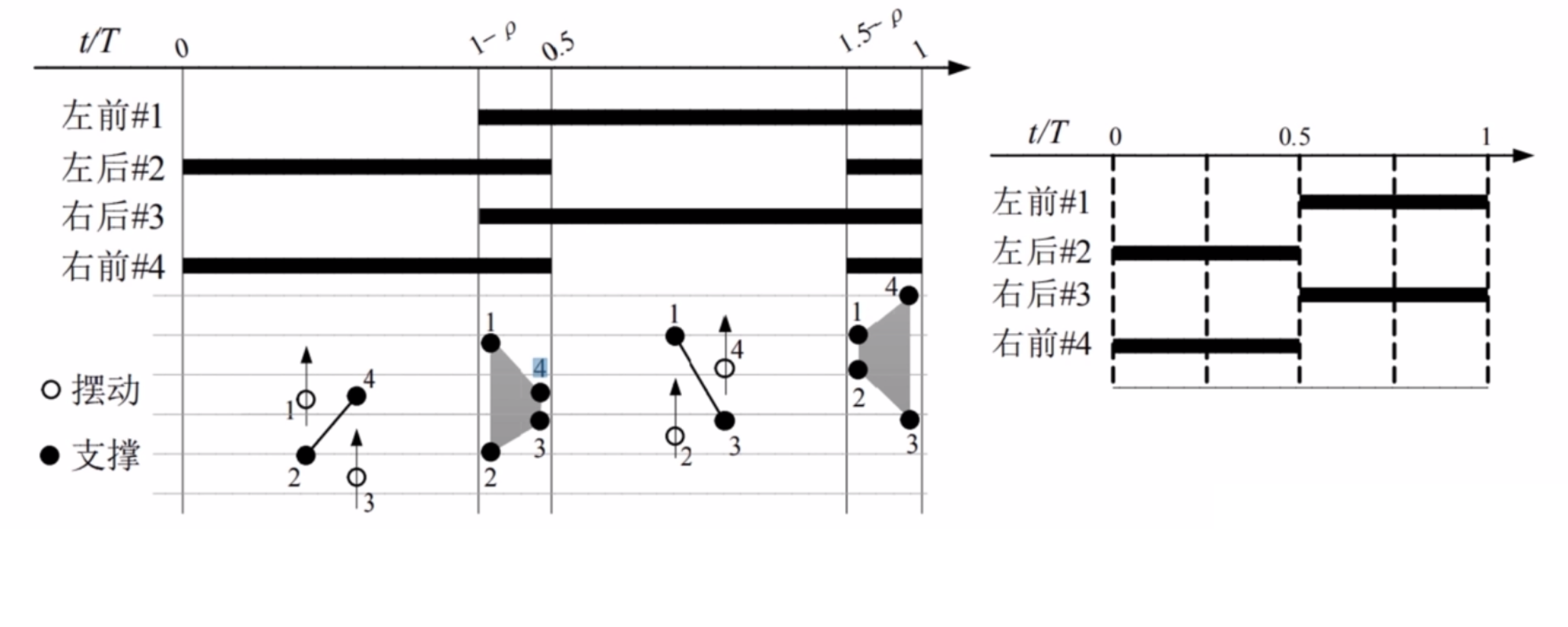
在小跑步态中,每半个周期有两个腿处于支撑态,两个腿处于摆动态, 并且对角腿的运动一致
我们将上边的封闭图形分成两部分,在前半周期,腿1和腿3由xs经1运动到xf,腿2和腿4由xf经2运动到xs,下半周期相反
循环上一过程我们便得到了trot步态
3.3安卓平台APP
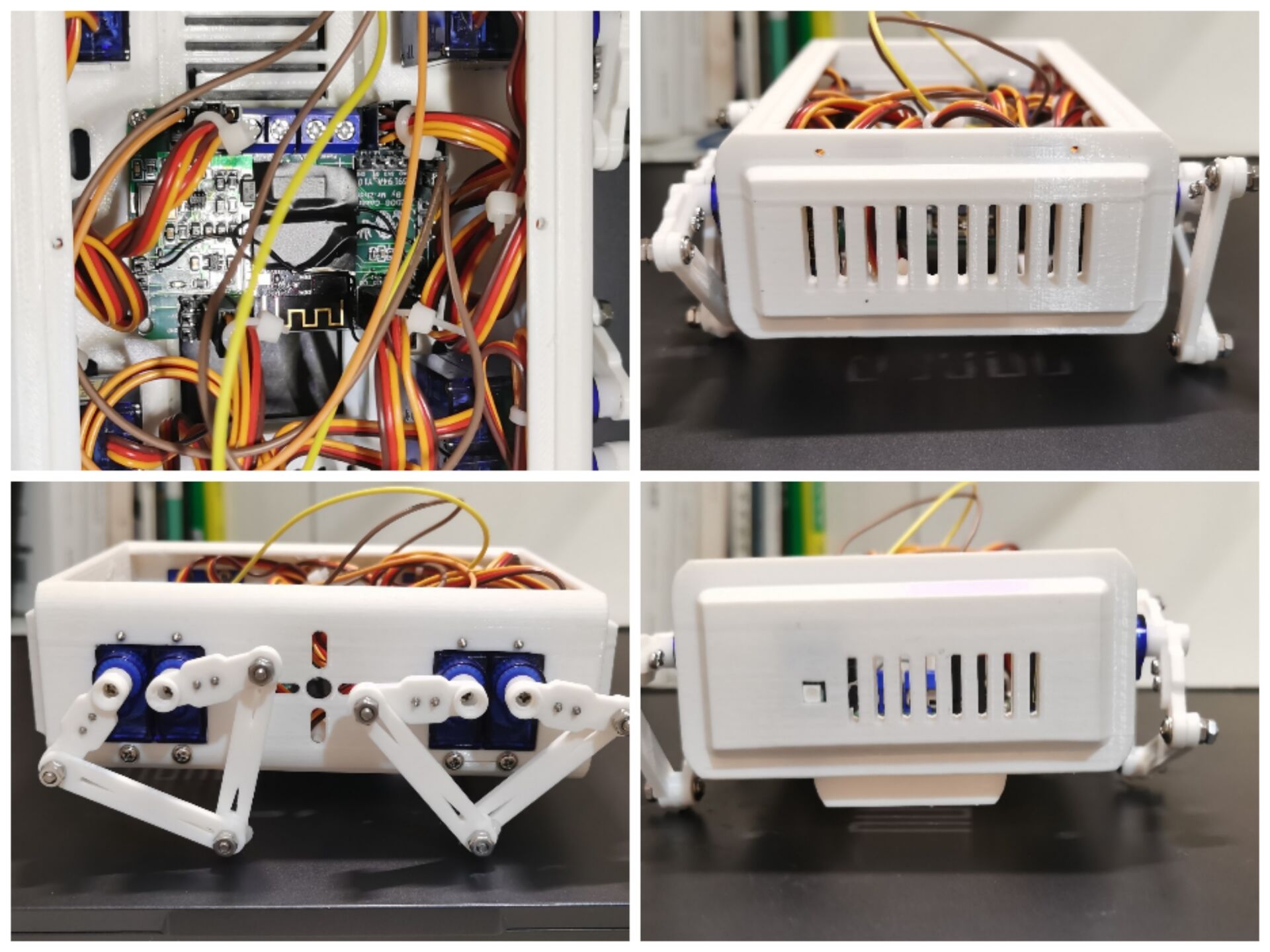
4.0实物验证
5.0项目感触
- 首先电路设计上一定要确保选用可以负载高电流的DC-DC芯片或者LDO,这样可以确保为舵机运行提供足够的动力,减少抖动现象。
- 机械设计中一定要确保整体的重量,由于选用的舵机扭矩有限,大重量下舵机难以驱动狗身。
- 机械安装中各条腿一定要进行机械调平,确保机械狗能够平稳的站在平面上,这是实现稳定步态的关键。
视频顺序:直线位移、trot步态测试、walk步态测试、下路测试、手机APP测试
设计图
BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论