


标准版
【训练营】机器狗狗
798
0
0
0
简介
Hi3861模组为主控的机器狗
简介:Hi3861模组为主控的机器狗开源协议
:GPL 3.0
创建时间:2022-07-08 00:18:02更新时间:2022-07-24 15:10:37
描述
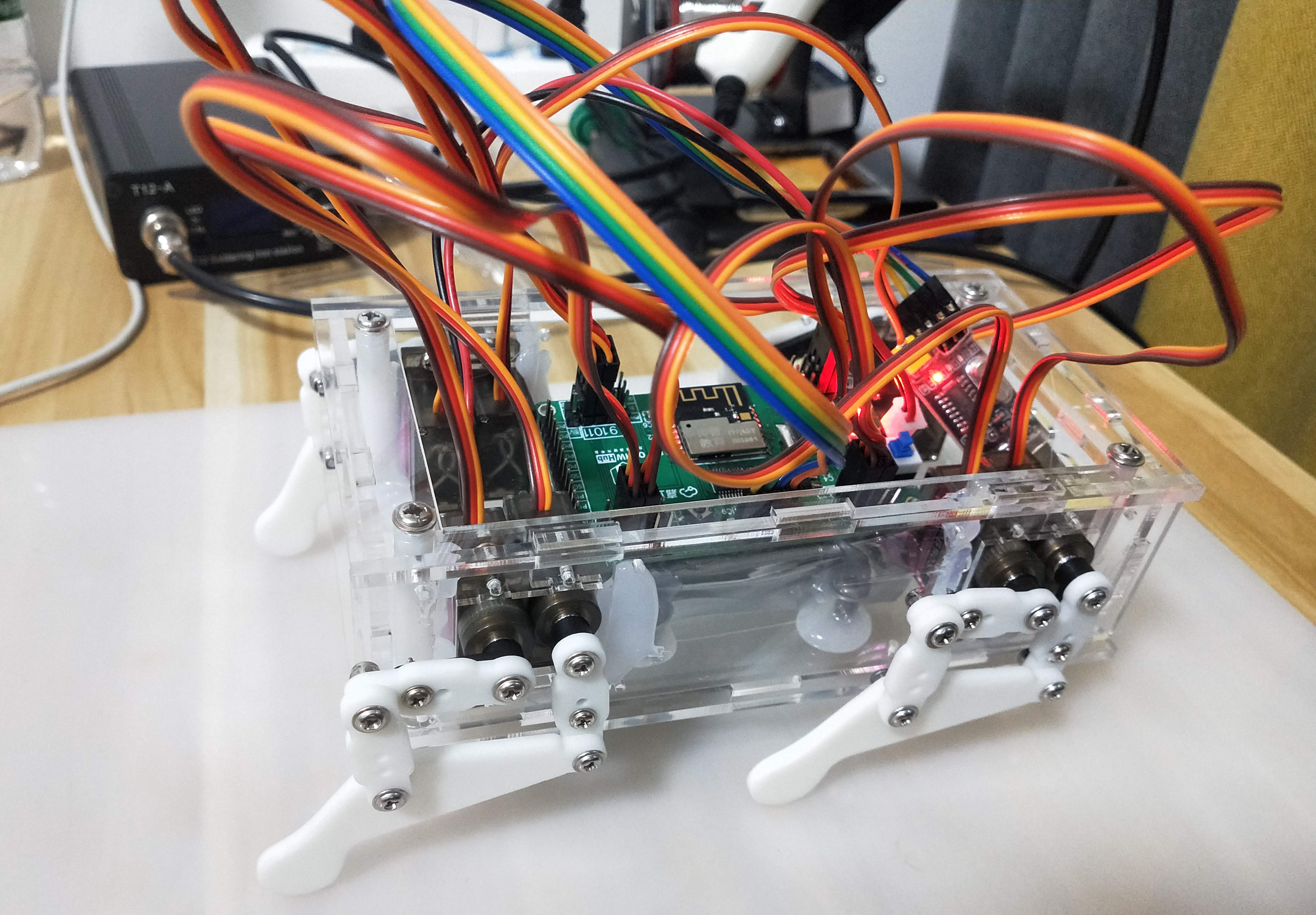
参考教学案例自己动手组装机械结构、焊接PCB、烧录程序实现的4条腿能动的狗。
1 鸿蒙狗
1.1 元器件选型
1.1.1 功能需求
- 大脑主控
- 多路舵机控制
PWM
- 电源供电
1.1.2 元器件
- Hi3861
立创商城中相应模组的商品编号:C2923578
- PCA9685
立创商城中相应元件的商品编号:C92206
16路PWM控制
I2C协议
- LDO线性稳压器
立创商城中相应元件的商品编号:
5V输出——C259973
3.3V输出——C347222
1.2 原理图设计
1.2.1 元器件作用关系
- 控制
- 主控与PCA9685通信
I2C协议
- 主控芯片Hi3861的GPIO10作为I2C的SDA引脚、GPIO09作为I2C的SCL引脚
- PCA9685分别有I2C的SDA、SCL引脚
- 供电
- 元器件电源要求
3.3V
- 主控芯片供电
- PCA9685芯片供电
- 舵机电源要求
MG90S舵机:电压5V、驱动电流200mA*16=3.2A
- 电池
7.4V-->5V-->3.3V
- 烧录问题
主控采用串口烧录,GPIO03为TXD引脚,GPIO04为TXD引脚
1.2.2 杂项考虑
1.3 PCB布线
每次对PCB进行改动后都需要进行重新铺铜的操作
1.4 小结
1.4.1 设计阶段
- 找到核心需求
- 完成最小验证板
- 选择合理的元器件
1.4.2 布线阶段
- 确定开发板形状、大小
- 元器件分区分类排布
- 粗略布线
- 精细化布线
- 铺铜、DRC处理
1 Python 开发环境搭建
1.1 Pycharm安装
打开链接:Pycharm下载地址,进入到Pycharm下载网页页面,点击“下载”如下图:
跳转到版本选择页面,选择“其他版本”,如下图:
跳转到具体版本选择界面,选择“PyCharm Community Edition”下面的“PyCharm Community Edition”,如下图:
等待下载完成,如图:
选择“在文件夹中显示”,如图
鼠标右键,选择“以管理员身份运行”,如图
安装向导,选择“Next”,如图
选择安装路径,我这里选择默认的路径“C:\Program Files\JetBrains\PyCharm Community Edition 2021.3.3”,如图
选择“Next”,如图:
我这里全部勾选,然后点击“Next”,如下图:
点击“Install”,如下图:
正在安装,如下图:
选择“Reboot now”,重启,点击“Finish”,如下图:
双击桌面快捷方式“PyCharm Community Edition 2021.3.3”,启动Pycharm软件,如下图:
勾选同意协议,点击“Continue”,如下图:
不向Jetbrains发送使用数据,如下图:
启动界面,如下图:
1.2 genkipi插件安装
选择“Plugins”,如下图:
选择设置下面的“Install plugin from disk”,如下图:
选择压缩包“genkipi-python-1.1.1.zip”,如下图:
点击“Accept”,如下图:
点击“Restart IDE”,重启Pycharm,如下图:
应用更改,如下图:
1.3 新建工程
选择“Projects”下的“New Project”,新建工程,如下图:
新建项目名,Python解释器,随便选一个就行,如下图:
点击“Create”,如下图:
点击“Close”,如下图:
正在安装,如下图:
在线安装失败,如下图:
到Python官网手动下载安装,如下图:


BOM
 克隆工程
克隆工程添加到专辑
0
0
分享
侵权投诉
工程成员
粉丝0|获赞0
相关工程
 暂无相关工程
暂无相关工程
评论